Last updated Schematic representation of a self-oscillation as a positive feedback loop. The oscillator V produces a feedback signal B. The controller at R uses this signal to modulate the external power S that acts on the oscillator. If the power is modulated in phase with the oscillator's velocity, a negative damping is established and the oscillation grows until limited by nonlinearities.
Self-oscillation is the generation and maintenance of a periodic motion by a source of power that lacks any corresponding periodicity. The oscillator itself controls the phase with which the external power acts on it. Self-oscillators are therefore distinct from forced and parametric resonators, in which the power that sustains the motion must be modulated externally.
In linear systems, self-oscillation appears as an instability associated with a negative damping term, which causes small perturbations to grow exponentially in amplitude. This negative damping is due to a positive feedback between the oscillation and the modulation of the external source of power. The amplitude and waveform of steady self-oscillations are determined by the nonlinear characteristics of the system.
Self-oscillations are important in physics, engineering, biology, and economics.
History of the subject
The study of self-oscillators dates back to the early 1830s, with the work of Robert Willis and George Biddell Airy on the mechanism by which the vocal cords produce the human voice.[1] Another instance of self-oscillation, associated with the unstable operation of centrifugal governors, was studied mathematically by James Clerk Maxwell in 1867.[2] In the second edition of his treatise on The Theory of Sound, published in 1896, Lord Rayleigh considered various instances of mechanical and acoustic self-oscillations (which he called "maintained vibration") and offered a simple mathematical model for them.[1]
Interest in the subject of self-oscillation was also stimulated by the work of Heinrich Hertz, starting in 1887, in which he used a spark-gap transmitter to generate radio waves that he showed correspond to electrical oscillations with frequencies of hundreds of millions of cycles per second. Hertz's work led to the development of wireless telegraphy. The first detailed theoretical work on such electrical self-oscillation was carried out by Henri Poincaré in the early 20th century.[3]
The same phenomenon is sometimes labelled as "maintained", "sustained", "self-exciting", "self-induced", "spontaneous", or "autonomous" oscillation. Unwanted self-oscillations are known in the mechanical engineering literature as hunting, and in electronics as parasitic oscillations.[1]
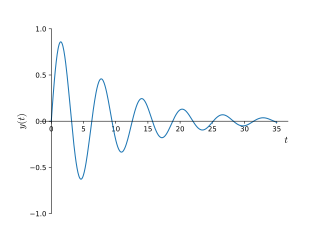
Self-oscillation is manifested as a linear instability of a dynamical system's static equilibrium. Two mathematical tests that can be used to diagnose such an instability are the Routh–Hurwitz and Nyquist criteria. The amplitude of the oscillation of an unstable system grows exponentially with time (i.e., small oscillations are negatively damped), until nonlinearities become important and limit the amplitude. This can produce a steady and sustained oscillation. In some cases, self-oscillation can be seen as resulting from a time lag in a closed loop system, which makes the change in variable xt dependent on the variable xt-1 evaluated at an earlier time.[1]
Simple mathematical models of self-oscillators involve negative linear damping and positive non-linear damping terms, leading to a Hopf bifurcation and the appearance of limit cycles.[1] The van der Pol oscillator is one such model that has been used extensively in the mathematical literature.
Examples in engineering
Railway and automotive wheels
Hunting oscillation in railwaywheels and shimmy in automotive tires can cause an uncomfortable wobbling effect, which in extreme cases can derail trains and cause cars to lose grip.
Central heating thermostats
Early central heating thermostats were guilty of self-exciting oscillation because they responded too quickly. The problem was overcome by hysteresis, i.e., making them switch state only when the temperature varied from the target by a specified minimum amount.
Automatic transmissions
Self-exciting oscillation occurred in early automatic transmission designs when the vehicle was traveling at a speed which was between the ideal speeds of 2 gears. In these situations the transmission system would switch almost continuously between the 2 gears, which was both annoying and hard on the transmission. Such behavior is now inhibited by introducing hysteresis into the system.
Steering of vehicles when course corrections are delayed
There are many examples of self-exciting oscillation caused by delayed course corrections, ranging from light aircraft in a strong wind to erratic steering of road vehicles by a driver who is inexperienced or drunk.
SEIG (self-excited induction generator)
If an induction motor is connected to a capacitor and the shaft turns above synchronous speed, it operates as a self-excited induction generator.
Self-exciting transmitters
Many early radio systems tuned their transmitter circuit, so the system automatically created radio waves of the desired frequency. This design has given way to designs that use a separate oscillator to provide a signal that is then amplified to the desired power.
For example, a reduction in population of an herbivore species because of predation, this makes the populations of predators of that species decline, the reduced level of predation allows the herbivore population to increase, this allows the predator population to increase, etc. Closed loops of time-lagged differential equations are a sufficient explanation for such cycles - in this case the delays are caused mainly by the breeding cycles of the species involved.
An electronic oscillator is an electronic circuit that produces a periodic, oscillating or alternating current (AC) signal, usually a sine wave, square wave or a triangle wave, powered by a direct current (DC) source. Oscillators are found in many electronic devices, such as radio receivers, television sets, radio and television broadcast transmitters, computers, computer peripherals, cellphones, radar, and many other devices.
In classical mechanics, a harmonic oscillator is a system that, when displaced from its equilibrium position, experiences a restoring force F proportional to the displacement x:
Oscillation is the repetitive or periodic variation, typically in time, of some measure about a central value or between two or more different states. Familiar examples of oscillation include a swinging pendulum and alternating current. Oscillations can be used in physics to approximate complex interactions, such as those between atoms.
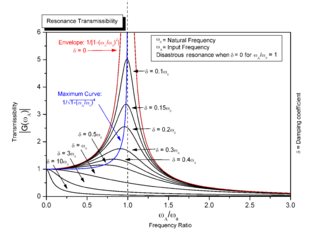
Resonance is the phenomenon, pertaining to oscillatory dynamical systems, wherein amplitude rises are caused by an external force with time-varying amplitude with the same frequency of variation as the natural frequency of the system. The amplitude rises that occur are a result of the fact that applied external forces at the natural frequency entail a net increase in mechanical energy of the system.
In electronics a relaxation oscillator is a nonlinear electronic oscillator circuit that produces a nonsinusoidal repetitive output signal, such as a triangle wave or square wave. The circuit consists of a feedback loop containing a switching device such as a transistor, comparator, relay, op amp, or a negative resistance device like a tunnel diode, that repetitively charges a capacitor or inductor through a resistance until it reaches a threshold level, then discharges it again. The period of the oscillator depends on the time constant of the capacitor or inductor circuit. The active device switches abruptly between charging and discharging modes, and thus produces a discontinuously changing repetitive waveform. This contrasts with the other type of electronic oscillator, the harmonic or linear oscillator, which uses an amplifier with feedback to excite resonant oscillations in a resonator, producing a sine wave.
In physics and engineering, the quality factor or Q factor is a dimensionless parameter that describes how underdamped an oscillator or resonator is. It is defined as the ratio of the initial energy stored in the resonator to the energy lost in one radian of the cycle of oscillation. Q factor is alternatively defined as the ratio of a resonator's centre frequency to its bandwidth when subject to an oscillating driving force. These two definitions give numerically similar, but not identical, results. Higher Q indicates a lower rate of energy loss and the oscillations die out more slowly. A pendulum suspended from a high-quality bearing, oscillating in air, has a high Q, while a pendulum immersed in oil has a low one. Resonators with high quality factors have low damping, so that they ring or vibrate longer.
A dissipative system is a thermodynamically open system which is operating out of, and often far from, thermodynamic equilibrium in an environment with which it exchanges energy and matter. A tornado may be thought of as a dissipative system. Dissipative systems stand in contrast to conservative systems.
In electronics, negative resistance (NR) is a property of some electrical circuits and devices in which an increase in voltage across the device's terminals results in a decrease in electric current through it.
A continuous wave or continuous waveform (CW) is an electromagnetic wave of constant amplitude and frequency, typically a sine wave, that for mathematical analysis is considered to be of infinite duration. It may refer to e.g. a laser or particle accelerator having a continuous output, as opposed to a pulsed output.
A sine wave, sinusoidal wave, or sinusoid is a periodic wave whose waveform (shape) is the trigonometric sine function. In mechanics, as a linear motion over time, this is simple harmonic motion; as rotation, it corresponds to uniform circular motion. Sine waves occur often in physics, including wind waves, sound waves, and light waves, such as monochromatic radiation. In engineering, signal processing, and mathematics, Fourier analysis decomposes general functions into a sum of sine waves of various frequencies, relative phases, and magnitudes.
A Wien bridge oscillator is a type of electronic oscillator that generates sine waves. It can generate a large range of frequencies. The oscillator is based on a bridge circuit originally developed by Max Wien in 1891 for the measurement of impedances. The bridge comprises four resistors and two capacitors. The oscillator can also be viewed as a positive gain amplifier combined with a bandpass filter that provides positive feedback. Automatic gain control, intentional non-linearity and incidental non-linearity limit the output amplitude in various implementations of the oscillator.
In physical systems, damping is the loss of energy of an oscillating system by dissipation. Damping is an influence within or upon an oscillatory system that has the effect of reducing or preventing its oscillation. Examples of damping include viscous damping in a fluid, surface friction, radiation, resistance in electronic oscillators, and absorption and scattering of light in optical oscillators. Damping not based on energy loss can be important in other oscillating systems such as those that occur in biological systems and bikes. Damping is not to be confused with friction, which is a type of dissipative force acting on a system. Friction can cause or be a factor of damping.
In the study of dynamical systems, the van der Pol oscillator is a non-conservative, oscillating system with non-linear damping. It evolves in time according to the second-order differential equation
Bifurcation theory is the mathematical study of changes in the qualitative or topological structure of a given family of curves, such as the integral curves of a family of vector fields, and the solutions of a family of differential equations. Most commonly applied to the mathematical study of dynamical systems, a bifurcation occurs when a small smooth change made to the parameter values of a system causes a sudden 'qualitative' or topological change in its behavior. Bifurcations occur in both continuous systems and discrete systems.
In the mathematical theory of bifurcations, a Hopfbifurcation is a critical point where, as a parameter changes, a system's stability switches and a periodic solution arises. More accurately, it is a local bifurcation in which a fixed point of a dynamical system loses stability, as a pair of complex conjugate eigenvalues—of the linearization around the fixed point—crosses the complex plane imaginary axis as a parameter crosses a threshold value. Under reasonably generic assumptions about the dynamical system, the fixed point becomes a small-amplitude limit cycle as the parameter changes.
In control systems theory, the describing function (DF) method, developed by Nikolay Mitrofanovich Krylov and Nikolay Bogoliubov in the 1930s, and extended by Ralph Kochenburger is an approximate procedure for analyzing certain nonlinear control problems. It is based on quasi-linearization, which is the approximation of the non-linear system under investigation by a linear time-invariant (LTI) transfer function that depends on the amplitude of the input waveform. By definition, a transfer function of a true LTI system cannot depend on the amplitude of the input function because an LTI system is linear. Thus, this dependence on amplitude generates a family of linear systems that are combined in an attempt to capture salient features of the non-linear system behavior. The describing function is one of the few widely applicable methods for designing nonlinear systems, and is very widely used as a standard mathematical tool for analyzing limit cycles in closed-loop controllers, such as industrial process controls, servomechanisms, and electronic oscillators.
In bifurcation theory, a field within mathematics, a Bogdanov–Takens bifurcation is a well-studied example of a bifurcation with co-dimension two, meaning that two parameters must be varied for the bifurcation to occur. It is named after Rifkat Bogdanov and Floris Takens, who independently and simultaneously described this bifurcation.
The FitzHugh–Nagumo model (FHN) describes a prototype of an excitable system.
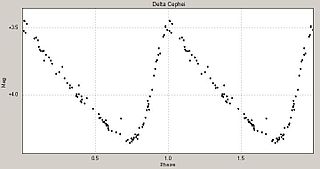
Stellar pulsations are caused by expansions and contractions in the outer layers as a star seeks to maintain equilibrium. These fluctuations in stellar radius cause corresponding changes in the luminosity of the star. Astronomers are able to deduce this mechanism by measuring the spectrum and observing the Doppler effect. Many intrinsic variable stars that pulsate with large amplitudes, such as the classical Cepheids, RR Lyrae stars and large-amplitude Delta Scuti stars show regular light curves.
↑ Maxwell, J. Clerk (1867). "On Governors". Proceedings of the Royal Society of London. 16: 270–283. JSTOR112510.
↑ Alicki, Robert; Horodecki, Michal; Jenkins, Alejandro; Lobejko, Marcin; Suarez, Gerardo (2023). "The Josephson junction as a quantum engine". New Journal of Physics. 25: 113013. arXiv:2302.04762. doi:10.1088/1367-2630/ad06d8.
.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.