
Modelica is an object-oriented, declarative, multi-domain modeling language for component-oriented modeling of complex systems, e.g., systems containing mechanical, electrical, electronic, hydraulic, thermal, control, electric power or process-oriented subcomponents. The free Modelica language is developed by the non-profit Modelica Association. The Modelica Association also develops the free Modelica Standard Library that contains about 1400 generic model components and 1200 functions in various domains, as of version 4.0.0.
In mathematics, a bi-directional delay line is a numerical analysis technique used in computer simulation for solving ordinary differential equations by converting them to hyperbolic equations. In this way an explicit solution scheme is obtained with highly robust numerical properties. It was introduced by Auslander in 1968.
VisSim is a visual block diagram program for the simulation of dynamical systems and model-based design of embedded systems, with its own visual language. It is developed by Visual Solutions of Westford, Massachusetts. Visual Solutions was acquired by Altair in August 2014 and its products have been rebranded as Altair Embed as a part of Altair's Model Based Development Suite. With Embed, virtual prototypes of dynamic systems can be developed. Models are built by sliding blocks into the work area and wiring them together with the mouse. Embed automatically converts the control diagrams into C-code ready to be downloaded to the target hardware.
Specialized wind energy software applications aid in the development and operation of wind farms.
Dymola is a commercial modeling and simulation environment based on the open Modelica modeling language.

MapleSim is a Modelica-based, multi-domain modeling and simulation tool developed by Maplesoft. MapleSim generates model equations, runs simulations, and performs analyses using the symbolic and numeric mathematical engine of Maple. Models are created by dragging-and-dropping components from a library into a central workspace, resulting in a model that represents the physical system in a graphical form. Maplesoft began development of MapleSim partly in response to a request from Toyota to produce physical modeling tools to aid in their new model-based development process.

SimulationX is a CAE software application running on Microsoft Windows for the physical simulation of technical systems. It is developed and sold by ESI Group.

SimEvents is a discrete event simulation tool developed by MathWorks. It adds a library of graphical building blocks for modeling queuing systems to the Simulink environment. It also adds an event-based simulation engine to the time-based simulation engine in Simulink
EMSO simulator is an equation-oriented process simulator with a graphical interface for modeling complex dynamic or steady-state processes. It is CAPE-OPEN compliant. EMSO stands for Environment for Modeling, Simulation, and Optimization. The ALSOC Project - a Portuguese acronym for Free Environment for Simulation, Optimization and Control of Processes -, which is based at the UFRGS, develops, maintains and distributes this object-oriented software. Pre-built models are available in the EMSO Modeling Library (EML). New models can be written in the EMSO modeling language or a user can embed models coded in C, C++ or Fortran into the simulation environment.
Ecolego is a simulation software tool that is used for creating dynamic models and performing deterministic and probabilistic simulations. It is also used for conducting risk assessments of complex dynamic systems evolving over time.
The Functional Mock-up Interface defines a standardized interface to be used in computer simulations to develop complex cyber-physical systems.
JModelica.org is a commercial software platform based on the Modelica modeling language for modeling, simulating, optimizing and analyzing complex dynamic systems. The platform is maintained and developed by Modelon AB in collaboration with academic and industrial institutions, notably Lund University and the Lund Center for Control of Complex Systems (LCCC). The platform has been used in industrial projects with applications in robotics, vehicle systems, energy systems, CO2 separation and polyethylene production.
Wolfram System Modeler, developed by Wolfram MathCore, is a platform for engineering as well as life-science modeling and simulation based on the Modelica language. It provides an interactive graphical modeling and simulation environment and a customizable set of component libraries.
Simcenter Amesim is a commercial simulation software for the modeling and analysis of multi-domain systems. It is part of systems engineering domain and falls into the mechatronic engineering field.

pSeven is a DSE software platform that was developed by pSeven SAS that features design, simulation, and analysis capabilities and assists in design decisions. It provides integration with third-party CAD and CAE software tools; multi-objective and robust optimization algorithms; data analysis, and uncertainty quantification tools.

VisualSim Architect is an electronic system-level software for modeling and simulation of electronic systems, embedded software and semiconductors. VisualSim Architect is a commercial version of the Ptolemy II research project at University of California Berkeley. The product was first released in 2003. VisualSim is a graphical tool that can be used for performance trade-off analyses using such metrics as bandwidth utilization, application response time and buffer requirements. It can be used for architectural analysis of algorithms, components, software instructions and hardware/ software partitioning.
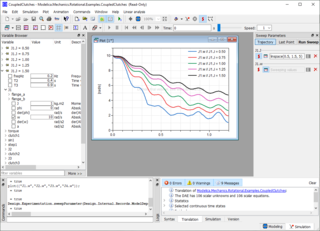
OpenModelica is a free and open source environment based on the Modelica modeling language for modeling, simulating, optimizing and analyzing complex dynamic systems. This software is actively developed by Open Source Modelica Consortium, a non-profit, non-governmental organization. The Open Source Modelica Consortium is run as a project of RISE SICS East AB in collaboration with Linköping University.

MSC ADAMS is a multibody dynamics simulation software system. It is currently owned by MSC Software Corporation. The simulation software solver runs mainly on Fortran and more recently C++ as well. According to the publisher, Adams is the most widely used multibody dynamics simulation software. The software package runs on both Windows and Linux.
