In geometry, a hypotenuse is the side of a right triangle that is opposite to the right angle. [1] It is always the longest side of the triangle. The other two sides of a right triangle are called legs or catheti. [2] [3]
Contents
- Etymology
- Properties
- Pythagorean theorem
- Sine and cosine
- In computer programming
- See also
- Notes
- References
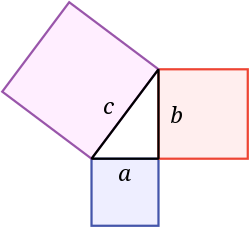
The length of the hypotenuse can be found using the Pythagorean theorem, which states that the square of the length of the hypotenuse equals the sum of the squares of the lengths of the other two sides. As an algebraic formula, this can be written as , where is the length of one leg, is the length of the other leg, and is the length of the hypotenuse. [4] For example, if the two legs of a right triangle have lengths 3 and 4, respectively, then the hypotenuse has length 5, because . [2]