An isoptic is the set of points for which two tangents of a given curve meet at a fixed angle (see below).
An isoptic of two plane curves is the set of points for which two tangents meet at a fixed angle.
Thales' theorem on a chordPQ can be considered as the orthoptic of two circles which are degenerated to the two points P and Q.
Orthoptic of a parabola
Any parabola can be transformed by a rigid motion (angles are not changed) into a parabola with equation . The slope at a point of the parabola is . Replacing x gives the parametric representation of the parabola with the tangent slope as parameter: The tangent has the equation with the still unknown n, which can be determined by inserting the coordinates of the parabola point. One gets
If a tangent contains the point (x0, y0), off the parabola, then the equation holds, which has two solutions m1 and m2 corresponding to the two tangents passing (x0, y0). The free term of a reduced quadratic equation is always the product of its solutions. Hence, if the tangents meet at (x0, y0) orthogonally, the following equations hold: The last equation is equivalent to which is the equation of the directrix.
The tangents to the ellipse at the vertices and co-vertices intersect at the 4 points , which lie on the desired orthoptic curve (the circle ).
The tangent at a point of the ellipse has the equation (see tangent to an ellipse). If the point is not a vertex this equation can be solved for y:
Using the abbreviations
I
and the equation one gets: Hence
II
and the equation of a non vertical tangent is Solving relations (I) for and respecting (II) leads to the slope depending parametric representation of the ellipse: (For another proof: see Ellipse §Parametric representation.)
If a tangent contains the point , off the ellipse, then the equation holds. Eliminating the square root leads to which has two solutions corresponding to the two tangents passing through . The constant term of a monic quadratic equation is always the product of its solutions. Hence, if the tangents meet at orthogonally, the following equations hold:
Orthoptics (red circles) of a circle, ellipses and hyperbolas
The last equation is equivalent to From (1) and (2) one gets:
The intersection points of orthogonal tangents are points of the circle .
Hyperbola
The ellipse case can be adopted nearly exactly to the hyperbola case. The only changes to be made are to replace with and to restrict m to |m| > b/a. Therefore:
The intersection points of orthogonal tangents are points of the circle , where a > b.
Orthoptic of an astroid
Orthoptic (purple) of an astroid
An astroid can be described by the parametric representation From the condition one recognizes the distance α in parameter space at which an orthogonal tangent to ċ(t) appears. It turns out that the distance is independent of parameter t, namely α = ± π/2. The equations of the (orthogonal) tangents at the points c(t) and c(t + π/2) are respectively: Their common point has coordinates: This is simultaneously a parametric representation of the orthoptic.
Elimination of the parameter t yields the implicit representation Introducing the new parameter φ = t − 5π/4 one gets (The proof uses the angle sum and difference identities.) Hence we get the polar representation of the orthoptic. Hence:
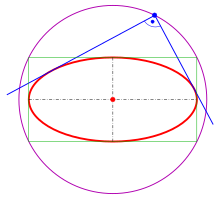
Isoptics (purple) of a parabola for angles 80° and 100°Isoptics (purple) of an ellipse for angles 80° and 100°Isoptics (purple) of a hyperbola for angles 80° and 100°
Below the isotopics for angles α ≠ 90° are listed. They are called α-isoptics. For the proofs see below.
Equations of the isoptics
Parabola:
The α-isoptics of the parabola with equation y = ax2 are the branches of the hyperbola The branches of the hyperbola provide the isoptics for the two angles α and 180° − α (seepicture).
Ellipse:
The α-isoptics of the ellipse with equation x2/a2 + y2/b2 = 1 are the two parts of the degree-4 curve (seepicture).
Hyperbola:
The α-isoptics of the hyperbola with the equation x2/a2 − y2/b2 = 1 are the two parts of the degree-4 curve
Proofs
Parabola:
A parabola y = ax2 can be parametrized by the slope of its tangents m = 2ax:
The tangent with slope m has the equation
The point (x0, y0) is on the tangent if and only if
This means the slopes m1, m2 of the two tangents containing (x0, y0) fulfil the quadratic equation
If the tangents meet at angle α or 180° − α, the equation
must be fulfilled. Solving the quadratic equation for m, and inserting m1, m2 into the last equation, one gets
This is the equation of the hyperbola above. Its branches bear the two isoptics of the parabola for the two angles α and 180° − α.
Ellipse:
In the case of an ellipse x2/a2 + y2/b2 = 1 one can adopt the idea for the orthoptic for the quadratic equation
Now, as in the case of a parabola, the quadratic equation has to be solved and the two solutions m1, m2 must be inserted into the equation
Rearranging shows that the isoptics are parts of the degree-4 curve:
Hyperbola:
The solution for the case of a hyperbola can be adopted from the ellipse case by replacing b2 with −b2 (as in the case of the orthoptics, seeabove).
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.