In mathematics, an involute (also known as an evolvent) is a particular type of curve that is dependent on another shape or curve. An involute of a curve is the locus of a point on a piece of taut string as the string is either unwrapped from or wrapped around the curve.[1]
Let be a regular curve in the plane with its curvature nowhere 0 and , then the curve with the parametric representation
is an involute of the given curve.
Proof
The string acts as a tangent to the curve . Its length is changed by an amount equal to the arc length traversed as it winds or unwinds. Arc length of the curve traversed in the interval is given by
where is the starting point from where the arc length is measured. Since the tangent vector depicts the taut string here, we get the string vector as
The vector corresponding to the end point of the string () can be easily calculated using vector addition, and one gets
Adding an arbitrary but fixed number to the integral results in an involute corresponding to a string extended by (like a ball of wool yarn having some length of thread already hanging before it is unwound). Hence, the involute can be varied by constant and/or adding a number to the integral (see Involutes of a semicubic parabola).
If one gets
Properties of involutes
Involute: properties. The angles depicted are 90 degrees.
In order to derive properties of a regular curve it is advantageous to suppose the arc length to be the parameter of the given curve, which lead to the following simplifications: and , with the curvature and the unit normal. One gets for the involute:
and
and the statement:
At point the involute is not regular (because ),
and from follows:
The normal of the involute at point is the tangent of the given curve at point .
The involutes are parallel curves, because of and the fact, that is the unit normal at .
The family of involutes and the family of tangents to the original curve makes up an orthogonal coordinate system. Consequently, one may construct involutes graphically. First, draw the family of tangent lines. Then, an involute can be constructed by always staying orthogonal to the tangent line passing the point.
There are generically two types of cusps in involutes. The first type is at the point where the involute touches the curve itself. This is a cusp of order 3/2. The second type is at the point where the curve has an inflection point. This is a cusp of order 5/2.
This can be visually seen by constructing a map defined by where is the arclength parametrization of the curve, and is the slope-angle of the curve at the point . This maps the 2D plane into a surface in 3D space. For example, this maps the circle into the hyperboloid of one sheet.
By this map, the involutes are obtained in a three-step process: map to , then to the surface in , then project it down to by removing the z-axis: where is any real constant.
Since the mapping has nonzero derivative at all , cusps of the involute can only occur where the derivative of is vertical (parallel to the z-axis), which can only occur where the surface in has a vertical tangent plane.
Generically, the surface has vertical tangent planes at only two cases: where the surface touches the curve, and where the curve has an inflection point.
cusp of order 3/2
For the first type, one can start by the involute of a circle, with equationthen set , and expand for small , to obtainthus giving the order 3/2 curve , a semicubical parabola.
cusp of order 5/2
Tangents and involutes of the cubic curve . The cusps of order 3/2 are on the cubic curve, while the cusps of order 5/2 are on the x-axis (the tangent line at the inflection point).
For the second type, consider the curve . The arc from to is of length , and the tangent at has angle . Thus, the involute starting from at distance has parametric formulaExpand it up to order , we obtainwhich is a cusp of order 5/2. Explicitly, one may solve for the polynomial expansion satisfied by :or which clearly shows the cusp shape.
Setting , we obtain the involute passing the origin. It is special as it contains no cusp. By serial expansion, it has parametric equationor
Examples
Involutes of a circle
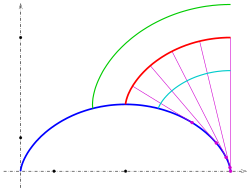
Involutes of a circle
For a circle with parametric representation , one has . Hence , and the path length is .
Evaluating the above given equation of the involute, one gets
The term is optional; it serves to set the start location of the curve on the circle. The figure shows involutes for (green), (red), (purple) and (light blue). The involutes look like Archimedean spirals, but they are actually not.
The arc length for and of the involute is
Involutes of a semicubic parabola (blue). Only the red curve is a parabola. Notice how the involutes and tangents make up an orthogonal coordinate system. This is a general fact.
Involutes of a semicubic parabola
The parametric equation describes a semicubical parabola. From one gets and . Extending the string by extensively simplifies further calculation, and one gets
Eliminating t yields showing that this involute is a parabola.
The other involutes are not tractrices, as they are parallel curves of a tractrix.
Involutes of a cycloid
Involutes of a cycloid (blue): Only the red curve is another cycloid
The parametric representation describes a cycloid. From , one gets (after having used some trigonometric formulas)
and
Hence the equations of the corresponding involute are
which describe the shifted red cycloid of the diagram. Hence
The involutes of the cycloid are parallel curves of the cycloid
(Parallel curves of a cycloid are not cycloids.)
Involute and evolute
The evolute of a given curve consists of the curvature centers of . Between involutes and evolutes the following statement holds: [4][5]
A curve is the evolute of any of its involutes.
Involute and evolute
Tractrix (red) as an involute of a catenary
The evolute of a tractrix is a catenary
Application
The most common profiles of modern gear teeth are involutes of a circle. In an involute gear system, the teeth of two meshing gears contact at a single instantaneous point that follows along a single straight line of action. The forces the contacting teeth exert on each other also follow this line and are normal to the teeth. The involute gear system maintaining these conditions follows the fundamental law of gearing: the ratio of angular velocities between the two gears must remain constant throughout.
With teeth of other shapes, the relative speeds and forces rise and fall as successive teeth engage, resulting in vibration, noise, and excessive wear. For this reason, nearly all modern planar gear systems are either involute or the related cycloidal gear system.[6]
Mechanism of a scroll compressor
The involute of a circle is also an important shape in gas compressing, as a scroll compressor can be built based on this shape. Scroll compressors make less sound than conventional compressors and have proven to be quite efficient.
The High Flux Isotope Reactor uses involute-shaped fuel elements, since these allow a constant-width channel between them for coolant.
↑ Arnolʹd, V. I. (1990). Huygens and Barrow, Newton and Hooke: pioneers in mathematical analysis and catastrophe theory from evolvents to quasicrystals. Basel: Birkhaüser Verlag. ISBN0-8176-2383-3. OCLC21873606.
↑ K. Burg, H. Haf, F. Wille, A. Meister: Vektoranalysis: Höhere Mathematik für Ingenieure, Naturwissenschaftler und ..., Springer-Verlag, 2012, ISBN3834883468, S. 30.
↑ R. Courant:Vorlesungen über Differential- und Integralrechnung, 1. Band, Springer-Verlag, 1955, S. 267.
↑ V. G. A. Goss (2013) "Application of analytical geometry to the shape of gear teeth", Resonance 18(9): 817 to 31 Springerlink (subscription required).
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.
































































































 Tractrix (red) as an involute of a catenary
Tractrix (red) as an involute of a catenary The evolute of a tractrix is a catenary
The evolute of a tractrix is a catenary