Related Research Articles

In computer science, a search algorithm is an algorithm designed to solve a search problem. Search algorithms work to retrieve information stored within particular data structure, or calculated in the search space of a problem domain, with either discrete or continuous values.
Software testing is the act of examining the artifacts and the behavior of the software under test by validation and verification. Software testing can also provide an objective, independent view of the software to allow the business to appreciate and understand the risks of software implementation. Test techniques include, but are not necessarily limited to:
Constraint programming (CP) is a paradigm for solving combinatorial problems that draws on a wide range of techniques from artificial intelligence, computer science, and operations research. In constraint programming, users declaratively state the constraints on the feasible solutions for a set of decision variables. Constraints differ from the common primitives of imperative programming languages in that they do not specify a step or sequence of steps to execute, but rather the properties of a solution to be found. In addition to constraints, users also need to specify a method to solve these constraints. This typically draws upon standard methods like chronological backtracking and constraint propagation, but may use customized code like a problem-specific branching heuristic.
Constraint satisfaction problems (CSPs) are mathematical questions defined as a set of objects whose state must satisfy a number of constraints or limitations. CSPs represent the entities in a problem as a homogeneous collection of finite constraints over variables, which is solved by constraint satisfaction methods. CSPs are the subject of research in both artificial intelligence and operations research, since the regularity in their formulation provides a common basis to analyze and solve problems of many seemingly unrelated families. CSPs often exhibit high complexity, requiring a combination of heuristics and combinatorial search methods to be solved in a reasonable time. Constraint programming (CP) is the field of research that specifically focuses on tackling these kinds of problems. Additionally, Boolean satisfiability problem (SAT), the satisfiability modulo theories (SMT), mixed integer programming (MIP) and answer set programming (ASP) are all fields of research focusing on the resolution of particular forms of the constraint satisfaction problem.
Software design is the process by which an agent creates a specification of a software artifact intended to accomplish goals, using a set of primitive components and subject to constraints. The term is sometimes used broadly to refer to "all the activity involved in conceptualizing, framing, implementing, commissioning, and ultimately modifying" the software, or more specifically "the activity following requirements specification and before programming, as ... [in] a stylized software engineering process."
In product development and process optimization, a requirement is a singular documented physical or functional need that a particular design, product or process aims to satisfy. It is commonly used in a formal sense in engineering design, including for example in systems engineering, software engineering, or enterprise engineering. It is a broad concept that could speak to any necessary function, attribute, capability, characteristic, or quality of a system for it to have value and utility to a customer, organization, internal user, or other stakeholder. Requirements can come with different levels of specificity; for example, a requirement specification or requirement "spec" refers to an explicit, highly objective/clear requirement to be satisfied by a material, design, product, or service.
Multi-disciplinary design optimization (MDO) is a field of engineering that uses optimization methods to solve design problems incorporating a number of disciplines. It is also known as multidisciplinary system design optimization (MSDO), and Multidisciplinary Design Analysis and Optimization (MDAO).
In artificial intelligence and operations research, constraint satisfaction is the process of finding a solution through a set of constraints that impose conditions that the variables must satisfy. A solution is therefore a set of values for the variables that satisfies all constraints—that is, a point in the feasible region.

Automated planning and scheduling, sometimes denoted as simply AI planning, is a branch of artificial intelligence that concerns the realization of strategies or action sequences, typically for execution by intelligent agents, autonomous robots and unmanned vehicles. Unlike classical control and classification problems, the solutions are complex and must be discovered and optimized in multidimensional space. Planning is also related to decision theory.
The Planning Domain Definition Language (PDDL) is an attempt to standardize Artificial Intelligence (AI) planning languages. It was first developed by Drew McDermott and his colleagues in 1998 mainly to make the 1998/2000 International Planning Competition (IPC) possible, and then evolved with each competition. The standardization provided by PDDL has the benefit of making research more reusable and easily comparable, though at the cost of some expressive power, compared to domain-specific systems.
In artificial intelligence, hierarchical task network (HTN) planning is an approach to automated planning in which the dependency among actions can be given in the form of hierarchically structured networks.
Query optimization is a feature of many relational database management systems and other databases such as NoSQL and graph databases. The query optimizer attempts to determine the most efficient way to execute a given query by considering the possible query plans.
In mathematics, a constraint is a condition of an optimization problem that the solution must satisfy. There are several types of constraints—primarily equality constraints, inequality constraints, and integer constraints. The set of candidate solutions that satisfy all constraints is called the feasible set.
In software engineering, graphical user interface testing is the process of testing a product's graphical user interface (GUI) to ensure it meets its specifications. This is normally done through the use of a variety of test cases.
Multi-objective optimization or Pareto optimization is an area of multiple-criteria decision making that is concerned with mathematical optimization problems involving more than one objective function to be optimized simultaneously. Multi-objective is a type of vector optimization that has been applied in many fields of science, including engineering, economics and logistics where optimal decisions need to be taken in the presence of trade-offs between two or more conflicting objectives. Minimizing cost while maximizing comfort while buying a car, and maximizing performance whilst minimizing fuel consumption and emission of pollutants of a vehicle are examples of multi-objective optimization problems involving two and three objectives, respectively. In practical problems, there can be more than three objectives.
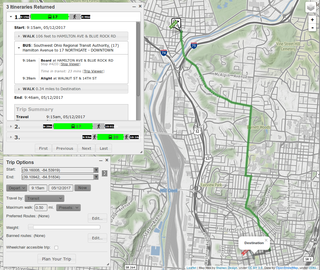
A journey planner, trip planner, or route planner is a specialized search engine used to find an optimal means of travelling between two or more given locations, sometimes using more than one transport mode. Searches may be optimized on different criteria, for example fastest, shortest, fewest changes, cheapest. They may be constrained, for example, to leave or arrive at a certain time, to avoid certain waypoints, etc. A single journey may use a sequence of several modes of transport, meaning the system may know about public transport services as well as transport networks for private transportation. Trip planning or journey planning is sometimes distinguished from route planning, which is typically thought of as using private modes of transportation such as cycling, driving, or walking, normally using a single mode at a time. Trip or journey planning, in contrast, would make use of at least one public transport mode which operates according to published schedules; given that public transport services only depart at specific times, an algorithm must therefore not only find a path to a destination, but seek to optimize it so as to minimize the waiting time incurred for each leg. In European Standards such as Transmodel, trip planning is used specifically to describe the planning of a route for a passenger, to avoid confusion with the completely separate process of planning the operational journeys to be made by public transport vehicles on which such trips are made.
In requirements engineering, requirements elicitation is the practice of researching and discovering the requirements of a system from users, customers, and other stakeholders. The practice is also sometimes referred to as "requirement gathering".
Given a system transforming a set of inputs to output values, described by a mathematical function f, optimization refers to the generation and selection of the best solution from some set of available alternatives, by systematically choosing input values from within an allowed set, computing the value of the function, and recording the best value found during the process. Many real-world and theoretical problems may be modeled in this general framework. For example, the inputs can be design parameters of a motor, the output can be the power consumption, or the inputs can be business choices and the output can be the obtained profit, or the inputs can describe the configuration of a physical system and the output can be its energy.
A participatory budgeting (PB) algorithm is an algorithm for implementing participatory budgeting.
References
- ↑ PPLAN, Bienvenu et al.
- ↑ HTN Planning with Preferences, Sohrabi et al.
- ↑ Planning with Preferences using Logic Programming, Son and Pontelli
- 1 2 Deterministic planning in the fifth international planning competition: PDDL3 and experimental evaluation of the planners, Gerevini et al.