Proofs
This result can be proven numerous different ways; the dimension counting argument is most direct, and generalizes to higher degree, while other proofs are special to conics.
Dimension counting
Intuitively, passing through five points in general linear position specifies five independent linear constraints on the (projective) linear space of conics, and hence specifies a unique conic, though this brief statement ignores subtleties.
More precisely, this is seen as follows:
- conics correspond to points in the five-dimensional projective space
- requiring a conic to pass through a point imposes a linear condition on the coordinates: for a fixed the equation is a linear equation in
- by dimension counting, five constraints (that the curve passes through five points) are necessary to specify a conic, as each constraint cuts the dimension of possibilities by 1, and one starts with 5 dimensions;
- in 5 dimensions, the intersection of 5 (independent) hyperplanes is a single point (formally, by Bézout's theorem);
- general linear position of the points means that the constraints are independent, and thus do specify a unique conic;
- the resulting conic is non-degenerate because it is a curve (since it has more than 1 point), and does not contain a line (else it would split as two lines, at least one of which must contain 3 of the 5 points, by the pigeonhole principle), so it is irreducible.




The two subtleties in the above analysis are that the resulting point is a quadratic equation (not a linear equation), and that the constraints are independent. The first is simple: if A, B, and C all vanish, then the equation defines a line, and any 3 points on this (indeed any number of points) lie on a line – thus general linear position ensures a conic. The second, that the constraints are independent, is significantly subtler: it corresponds to the fact that given five points in general linear position in the plane, their images in under the Veronese map are in general linear position, which is true because the Veronese map is biregular: i.e., if the image of five points satisfy a relation, then the relation can be pulled back and the original points must also satisfy a relation. The Veronese map has coordinates and the target is dual to the of conics. The Veronese map corresponds to "evaluation of a conic at a point", and the statement about independence of constraints is exactly a geometric statement about this map.




Synthetic proof
That five points determine a conic can be proven by synthetic geometry —i.e., in terms of lines and points in the plane—in addition to the analytic (algebraic) proof given above. Such a proof can be given using a theorem of Jakob Steiner, [1] which states:
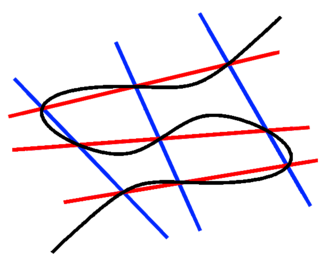
- Given a projective transformation f, between the pencil of lines passing through a point X and the pencil of lines passing through a point Y, the set C of intersection points between a line x and its image forms a conic.
- Note that X and Y are on this conic by considering the preimage and image of the line XY (which is respectively a line through X and a line through Y).

This can be shown by taking the points X and Y to the standard points and by a projective transformation, in which case the pencils of lines correspond to the horizontal and vertical lines in the plane, and the intersections of corresponding lines to the graph of a function, which (must be shown) is a hyperbola, hence a conic, hence the original curve C is a conic.


Now given five points X, Y, A, B, C, the three lines can be taken to the three lines by a unique projective transform, since projective transforms are simply 3-transitive on lines (they are simply 3-transitive on points, hence by projective duality they are 3-transitive on lines). Under this map X maps to Y, since these are the unique intersection points of these lines, and thus satisfy the hypothesis of Steiner’s theorem. The resulting conic thus contains all five points, and is the unique such conic, as desired.