In geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
Computational geometry is a branch of computer science devoted to the study of algorithms which can be stated in terms of geometry. Some purely geometrical problems arise out of the study of computational geometric algorithms, and such problems are also considered to be part of computational geometry. While modern computational geometry is a recent development, it is one of the oldest fields of computing with a history stretching back to antiquity.
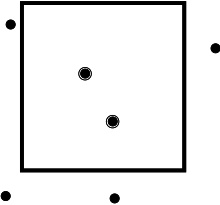
The point location problem is a fundamental topic of computational geometry. It finds applications in areas that deal with processing geometrical data: computer graphics, geographic information systems (GIS), motion planning, and computer aided design (CAD).

In computer graphics and computational geometry, a bounding volume for a set of objects is a closed region that completely contains the union of the objects in the set. Bounding volumes are used to improve the efficiency of geometrical operations, such as by using simple regions, having simpler ways to test for overlap.
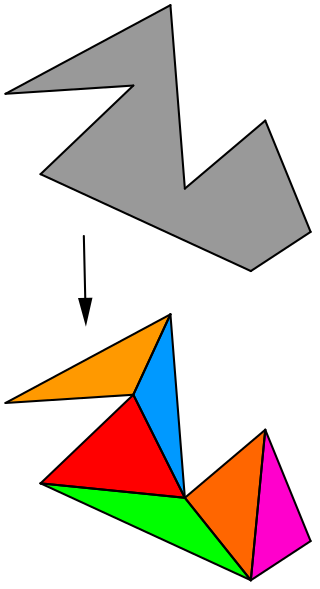
In computational geometry, polygon triangulation is the partition of a polygonal area P into a set of triangles, i.e., finding a set of triangles with pairwise non-intersecting interiors whose union is P.
In computer science, an interval tree is a tree data structure to hold intervals. Specifically, it allows one to efficiently find all intervals that overlap with any given interval or point. It is often used for windowing queries, for instance, to find all roads on a computerized map inside a rectangular viewport, or to find all visible elements inside a three-dimensional scene. A similar data structure is the segment tree.

In computer science, a k-d tree is a space-partitioning data structure for organizing points in a k-dimensional space. K-dimensional is that which concerns exactly k orthogonal axes or a space of any number of dimensions. k-d trees are a useful data structure for several applications, such as:
Nearest neighbor search (NNS), as a form of proximity search, is the optimization problem of finding the point in a given set that is closest to a given point. Closeness is typically expressed in terms of a dissimilarity function: the less similar the objects, the larger the function values.
In computer science, fractional cascading is a technique to speed up a sequence of binary searches for the same value in a sequence of related data structures. The first binary search in the sequence takes a logarithmic amount of time, as is standard for binary searches, but successive searches in the sequence are faster. The original version of fractional cascading, introduced in two papers by Chazelle and Guibas in 1986, combined the idea of cascading, originating in range searching data structures of Lueker (1978) and Willard (1978), with the idea of fractional sampling, which originated in Chazelle (1983). Later authors introduced more complex forms of fractional cascading that allow the data structure to be maintained as the data changes by a sequence of discrete insertion and deletion events.

In geometry, a set K ⊂ Rd is defined to be orthogonally convex if, for every line L that is parallel to one of standard basis vectors, the intersection of K with L is empty, a point, or a single segment. The term "orthogonal" refers to corresponding Cartesian basis and coordinates in Euclidean space, where different basis vectors are perpendicular, as well as corresponding lines. Unlike ordinary convex sets, an orthogonally convex set is not necessarily connected.

In discrete geometry, a -set of a finite point set in the Euclidean plane is a subset of elements of that can be strictly separated from the remaining points by a line. More generally, in Euclidean space of higher dimensions, a -set of a finite point set is a subset of elements that can be separated from the remaining points by a hyperplane. In particular, when , the line or hyperplane that separates a -set from the rest of is a halving line or halving plane.

The closest pair of points problem or closest pair problem is a problem of computational geometry: given points in metric space, find a pair of points with the smallest distance between them. The closest pair problem for points in the Euclidean plane was among the first geometric problems that were treated at the origins of the systematic study of the computational complexity of geometric algorithms.

In geometry, a polygon P in the plane is called monotone with respect to a straight line L, if every line orthogonal to L intersects the boundary of P at most twice.
In computer science, a range tree is an ordered tree data structure to hold a list of points. It allows all points within a given range to be reported efficiently, and is typically used in two or higher dimensions. Range trees were introduced by Jon Louis Bentley in 1979. Similar data structures were discovered independently by Lueker, Lee and Wong, and Willard. The range tree is an alternative to the k-d tree. Compared to k-d trees, range trees offer faster query times of but worse storage of , where n is the number of points stored in the tree, d is the dimension of each point and k is the number of points reported by a given query.
In computational geometry, the Bentley–Ottmann algorithm is a sweep line algorithm for listing all crossings in a set of line segments, i.e. it finds the intersection points of line segments. It extends the Shamos–Hoey algorithm, a similar previous algorithm for testing whether or not a set of line segments has any crossings. For an input consisting of line segments with crossings, the Bentley–Ottmann algorithm takes time . In cases where , this is an improvement on a naïve algorithm that tests every pair of segments, which takes .

Kenneth Lee Clarkson is an American computer scientist known for his research in computational geometry. He is a researcher at the IBM Almaden Research Center, and co-editor-in-chief of the Journal of Computational Geometry.
David Mount is a professor at the University of Maryland, College Park department of computer science whose research is in computational geometry.
In computer science, the range query problem consists of efficiently answering several queries regarding a given interval of elements within an array. For example, a common task, known as range minimum query, is finding the smallest value inside a given range within a list of numbers.
In computer science, the cell-probe model is a model of computation similar to the random-access machine, except that all operations are free except memory access. This model is useful for proving lower bounds of algorithms for data structure problems.
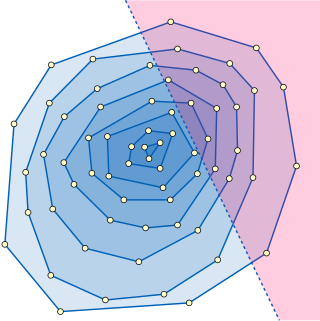
In computational geometry, the convex layers of a set of points in the Euclidean plane are a sequence of nested convex polygons having the points as their vertices. The outermost one is the convex hull of the points and the rest are formed in the same way recursively. The innermost layer may be degenerate, consisting only of one or two points. The problem of constructing convex layers has also been called onion peeling or onion decomposition.