A sphere or ball with unit radius and center at the origin of the space is called the unit sphere or the unit ball. Any arbitrary sphere can be transformed to the unit sphere by a combination of translation and scaling, so the study of spheres in general can often be reduced to the study of the unit sphere.
In more general contexts, a unit sphere is the set of points of distance 1 from a fixed central point, where different norms can be used as general notions of "distance", and an (open) unit ball is the region inside.
Unit spheres and balls in Euclidean space
In Euclidean space of dimensions, the -dimensional unit sphere is the set of all points which satisfy the equation
The open unit -ball is the set of all points satisfying the inequality
and closed unit -ball is the set of all points satisfying the inequality
Graphs of volumes (V) and surface areas (S) of unit n-balls
The classical equation of a unit sphere is that of the ellipsoid with a radius of 1 and no alterations to the -, -, or - axes:
The volume of the unit ball in Euclidean -space, and the surface area of the unit sphere, appear in many important formulas of analysis. The volume of the unit -ball, which we denote can be expressed by making use of the gamma function. It is
The hypervolume of the -dimensional unit sphere (i.e., the "area" of the boundary of the -dimensional unit ball), which we denote can be expressed as
For example, is the "area" of the boundary of the unit ball , which simply counts the two points. Then is the "area" of the boundary of the unit disc, which is the circumference of the unit circle. is the area of the boundary of the unit ball , which is the surface area of the unit sphere .
The surface areas and the volumes for some values of are as follows:
(surface area)
(volume)
0
1
1
2
2
2
6.283
3.141
3
12.57
4.189
4
19.74
4.935
5
26.32
5.264
6
31.01
5.168
7
33.07
4.725
8
32.47
4.059
9
29.69
3.299
10
25.50
2.550
where the decimal expanded values for are rounded to the displayed precision.
The surface area of an -sphere with radius is and the volume of an - ball with radius is For instance, the area is for the two-dimensional surface of the three-dimensional ball of radius The volume is for the three-dimensional ball of radius.
The latter is the disjoint union of the former and their common border, the unit sphere of
The "shape" of the unit ball is entirely dependent on the chosen norm; it may well have "corners", and for example may look like in the case of the max-norm in . One obtains a naturally round ball as the unit ball pertaining to the usual Hilbert space norm, based in the finite-dimensional case on the Euclidean distance; its boundary is what is usually meant by the unit sphere.
Let Define the usual -norm for as:
Then is the usual Hilbert space norm. is called the Hamming norm, or -norm. The condition is necessary in the definition of the norm, as the unit ball in any normed space must be convex as a consequence of the triangle inequality. Let denote the max-norm or -norm of .
Note that for the one-dimensional circumferences of the two-dimensional unit balls, we have:
is the minimum value.
is the maximum value.
Generalizations
Metric spaces
All three of the above definitions can be straightforwardly generalized to a metric space, with respect to a chosen origin. However, topological considerations (interior, closure, border) need not apply in the same way (e.g., in ultrametric spaces, all of the three are simultaneously open and closed sets), and the unit sphere may even be empty in some metric spaces.
Quadratic forms
If is a linear space with a real quadratic form then may be called the unit sphere[3][4] or unit quasi-sphere of For example, the quadratic form , when set equal to one, produces the unit hyperbola, which plays the role of the "unit circle" in the plane of split-complex numbers. Similarly, the quadratic form yields a pair of lines for the unit sphere in the dual number plane.
Euclidean space is the fundamental space of geometry, intended to represent physical space. Originally, in Euclid's Elements, it was the three-dimensional space of Euclidean geometry, but in modern mathematics there are Euclidean spaces of any positive integer dimension n, which are called Euclidean n-spaces when one wants to specify their dimension. For n equal to one or two, they are commonly called respectively Euclidean lines and Euclidean planes. The qualifier "Euclidean" is used to distinguish Euclidean spaces from other spaces that were later considered in physics and modern mathematics.
In the mathematical field of algebraic topology, the fundamental group of a topological space is the group of the equivalence classes under homotopy of the loops contained in the space. It records information about the basic shape, or holes, of the topological space. The fundamental group is the first and simplest homotopy group. The fundamental group is a homotopy invariant—topological spaces that are homotopy equivalent have isomorphic fundamental groups. The fundamental group of a topological space is denoted by .
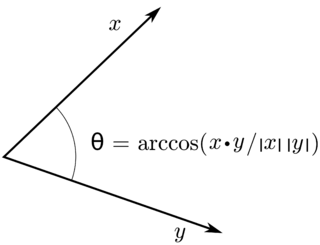
In mathematics, an inner product space is a real vector space or a complex vector space with an operation called an inner product. The inner product of two vectors in the space is a scalar, often denoted with angle brackets such as in . Inner products allow formal definitions of intuitive geometric notions, such as lengths, angles, and orthogonality of vectors. Inner product spaces generalize Euclidean vector spaces, in which the inner product is the dot product or scalar product of Cartesian coordinates. Inner product spaces of infinite dimension are widely used in functional analysis. Inner product spaces over the field of complex numbers are sometimes referred to as unitary spaces. The first usage of the concept of a vector space with an inner product is due to Giuseppe Peano, in 1898.
In mathematics, an n-sphere or hypersphere is an -dimensional generalization of the -dimensional circle and -dimensional sphere to any non-negative integer . The -sphere is the setting for -dimensional spherical geometry.
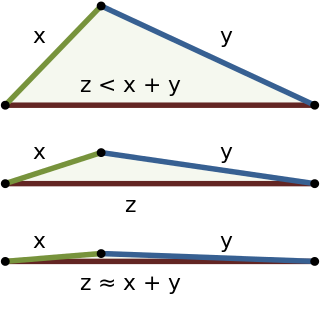
In mathematics, the triangle inequality states that for any triangle, the sum of the lengths of any two sides must be greater than or equal to the length of the remaining side. This statement permits the inclusion of degenerate triangles, but some authors, especially those writing about elementary geometry, will exclude this possibility, thus leaving out the possibility of equality. If x, y, and z are the lengths of the sides of the triangle, with no side being greater than z, then the triangle inequality states that
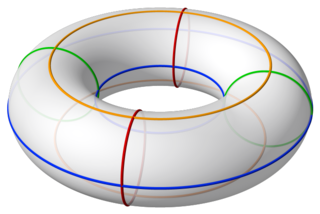
In geometry, a torus is a surface of revolution generated by revolving a circle in three-dimensional space one full revolution about an axis that is coplanar with the circle. The main types of toruses include ring toruses, horn toruses, and spindle toruses. A ring torus is sometimes colloquially referred to as a donut or doughnut.
In mathematics, a ball is the solid figure bounded by a sphere; it is also called a solid sphere. It may be a closed ball or an open ball.
In mathematics, the orthogonal group in dimension n, denoted O(n), is the group of distance-preserving transformations of a Euclidean space of dimension n that preserve a fixed point, where the group operation is given by composing transformations. The orthogonal group is sometimes called the general orthogonal group, by analogy with the general linear group. Equivalently, it is the group of n × n orthogonal matrices, where the group operation is given by matrix multiplication (an orthogonal matrix is a real matrix whose inverse equals its transpose). The orthogonal group is an algebraic group and a Lie group. It is compact.
In mathematics, hyperbolic space of dimension n is the unique simply connected, n-dimensional Riemannian manifold of constant sectional curvature equal to −1. It is homogeneous, and satisfies the stronger property of being a symmetric space. There are many ways to construct it as an open subset of with an explicitly written Riemannian metric; such constructions are referred to as models. Hyperbolic 2-space, H2, which was the first instance studied, is also called the hyperbolic plane.
In mathematics, the isoperimetric inequality is a geometric inequality involving the perimeter of a set and its volume. In -dimensional space the inequality lower bounds the surface area or perimeter of a set by its volume ,
In mathematics, a norm is a function from a real or complex vector space to the non-negative real numbers that behaves in certain ways like the distance from the origin: it commutes with scaling, obeys a form of the triangle inequality, and is zero only at the origin. In particular, the Euclidean distance in a Euclidean space is defined by a norm on the associated Euclidean vector space, called the Euclidean norm, the 2-norm, or, sometimes, the magnitude of the vector. This norm can be defined as the square root of the inner product of a vector with itself.
In mathematics, and specifically in potential theory, the Poisson kernel is an integral kernel, used for solving the two-dimensional Laplace equation, given Dirichlet boundary conditions on the unit disk. The kernel can be understood as the derivative of the Green's function for the Laplace equation. It is named for Siméon Poisson.
In mathematics, systolic geometry is the study of systolic invariants of manifolds and polyhedra, as initially conceived by Charles Loewner and developed by Mikhail Gromov, Michael Freedman, Peter Sarnak, Mikhail Katz, Larry Guth, and others, in its arithmetical, ergodic, and topological manifestations. See also Introduction to systolic geometry.
In mathematics, Mostow's rigidity theorem, or strong rigidity theorem, or Mostow–Prasad rigidity theorem, essentially states that the geometry of a complete, finite-volume hyperbolic manifold of dimension greater than two is determined by the fundamental group and hence unique. The theorem was proven for closed manifolds by Mostow and extended to finite volume manifolds by Marden (1974) in 3 dimensions, and by Prasad in all dimensions at least 3. Gromov (1981) gave an alternate proof using the Gromov norm. Besson, Courtois & Gallot (1996) gave the simplest available proof.
In geometry, a three-dimensional space is a mathematical space in which three values (coordinates) are required to determine the position of a point. Most commonly, it is the three-dimensional Euclidean space, that is, the Euclidean space of dimension three, which models physical space. More general three-dimensional spaces are called 3-manifolds. The term may also refer colloquially to a subset of space, a three-dimensional region, a solid figure.
Riesz's lemma is a lemma in functional analysis. It specifies conditions that guarantee that a subspace in a normed vector space is dense. The lemma may also be called the Riesz lemma or Riesz inequality. It can be seen as a substitute for orthogonality when the normed space is not an inner product space.
In differential geometry, Pu's inequality, proved by Pao Ming Pu, relates the area of an arbitrary Riemannian surface homeomorphic to the real projective plane with the lengths of the closed curves contained in it.
In Riemannian geometry, the filling radius of a Riemannian manifold X is a metric invariant of X. It was originally introduced in 1983 by Mikhail Gromov, who used it to prove his systolic inequality for essential manifolds, vastly generalizing Loewner's torus inequality and Pu's inequality for the real projective plane, and creating systolic geometry in its modern form.
In geometry, a ball is a region in a space comprising all points within a fixed distance, called the radius, from a given point; that is, it is the region enclosed by a sphere or hypersphere. An n-ball is a ball in an n-dimensional Euclidean space. The volume of a n-ball is the Lebesgue measure of this ball, which generalizes to any dimension the usual volume of a ball in 3-dimensional space. The volume of a n-ball of radius R is where is the volume of the unit n-ball, the n-ball of radius 1.
In mathematics, hyperbolic complex space is a Hermitian manifold which is the equivalent of the real hyperbolic space in the context of complex manifolds. The complex hyperbolic space is a Kähler manifold, and it is characterised by being the only simply connected Kähler manifold whose holomorphic sectional curvature is constant equal to -1. Its underlying Riemannian manifold has non-constant negative curvature, pinched between -1 and -1/4 : in particular, it is a CAT(-1/4) space.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.