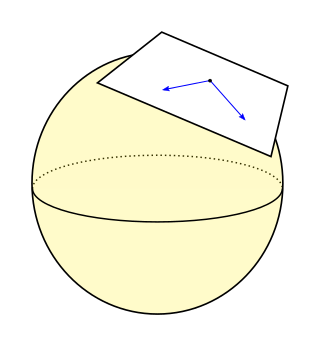
where Tx(M) denotes the tangent space to M at x. Thus, elements of UT(M) are pairs (x, v), where x is some point of the manifold and v is some tangent direction (of unit length) to the manifold at x. The unit tangent bundle is equipped with a natural projection
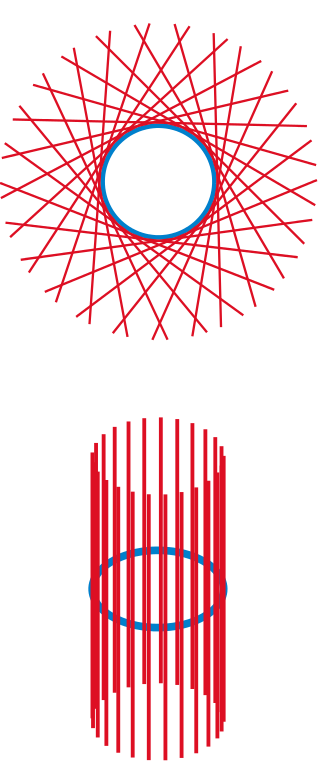
which takes each point of the bundle to its base point. The fiber π−1(x) over each point x ∈ M is an (n−1)-sphereSn−1, where n is the dimension of M. The unit tangent bundle is therefore a sphere bundle over M with fiber Sn−1.
The definition of unit sphere bundle can easily accommodate Finsler manifolds as well. Specifically, if M is a manifold equipped with a Finsler metric F:TM→R, then the unit sphere bundle is the subbundle of the tangent bundle whose fiber at x is the indicatrix of F:
If M is an infinite-dimensional manifold (for example, a Banach, Fréchet or Hilbert manifold), then UT(M) can still be thought of as the unit sphere bundle for the tangent bundle T(M), but the fiber π−1(x) over x is then the infinite-dimensional unit sphere in the tangent space.
Structures
The unit tangent bundle carries a variety of differential geometric structures. The metric on M induces a contact structure on UTM. This is given in terms of a tautological one-form, defined at a point u of UTM (a unit tangent vector of M) by
where is the pushforward along π of the vector v∈TuUTM.
Geometrically, this contact structure can be regarded as the distribution of (2n−2)-planes which, at the unit vector u, is the pullback of the orthogonal complement of u in the tangent space of M. This is a contact structure, for the fiber of UTM is obviously an integral manifold (the vertical bundle is everywhere in the kernel of θ), and the remaining tangent directions are filled out by moving up the fiber of UTM. Thus the maximal integral manifold of θ is (an open set of) M itself.
On a Finsler manifold, the contact form is defined by the analogous formula
where gu is the fundamental tensor (the hessian of the Finsler metric). Geometrically, the associated distribution of hyperplanes at the point u∈UTxM is the inverse image under π* of the tangent hyperplane to the unit sphere in TxM at u.
The volume form θ∧dθn−1 defines a measure on M, known as the kinematic measure, or Liouville measure, that is invariant under the geodesic flow of M. As a Radon measure, the kinematic measure μ is defined on compactly supported continuous functions ƒ on UTM by
where dV is the volume element on M, and μp is the standard rotationally-invariant Borel measure on the Euclidean sphere UTpM.
into a vertical space V=kerπ* and horizontal space H on which π* is a linear isomorphism at each point of UTM. This splitting induces a metric on UTM by declaring that this splitting be an orthogonal direct sum, and defining the metric on H by the pullback:
and defining the metric on V as the induced metric from the embedding of the fiber UTxM into the Euclidean space TxM. Equipped with this metric and contact form, UTM becomes a Sasakian manifold.
Bibliography
Jeffrey M. Lee: Manifolds and Differential Geometry. Graduate Studies in Mathematics Vol. 107, American Mathematical Society, Providence (2009). ISBN978-0-8218-4815-9
In differential geometry, a Riemannian manifold is a geometric space on which many geometric notions such as distance, angles, length, volume, and curvature are defined. Euclidean space, the -sphere, hyperbolic space, and smooth surfaces in three-dimensional space, such as ellipsoids and paraboloids, are all examples of Riemannian manifolds. Riemannian manifolds are named after German mathematician Bernhard Riemann, who first conceptualized them.
In the mathematical field of differential geometry, a metric tensor is an additional structure on a manifold M that allows defining distances and angles, just as the inner product on a Euclidean space allows defining distances and angles there. More precisely, a metric tensor at a point p of M is a bilinear form defined on the tangent space at p, and a metric field on M consists of a metric tensor at each point p of M that varies smoothly with p.
A tangent bundle is the collection of all of the tangent spaces for all points on a manifold, structured in a way that it forms a new manifold itself. Formally, in differential geometry, the tangent bundle of a differentiable manifold is a manifold which assembles all the tangent vectors in . As a set, it is given by the disjoint union of the tangent spaces of . That is,
In mathematics, especially differential geometry, the cotangent bundle of a smooth manifold is the vector bundle of all the cotangent spaces at every point in the manifold. It may be described also as the dual bundle to the tangent bundle. This may be generalized to categories with more structure than smooth manifolds, such as complex manifolds, or algebraic varieties or schemes. In the smooth case, any Riemannian metric or symplectic form gives an isomorphism between the cotangent bundle and the tangent bundle, but they are not in general isomorphic in other categories.
In mathematics, a vector bundle is a topological construction that makes precise the idea of a family of vector spaces parameterized by another space : to every point of the space we associate a vector space in such a way that these vector spaces fit together to form another space of the same kind as , which is then called a vector bundle over .
In mathematics, and particularly topology, a fiber bundle is a space that is locally a product space, but globally may have a different topological structure. Specifically, the similarity between a space and a product space is defined using a continuous surjective map, that in small regions of behaves just like a projection from corresponding regions of to The map called the projection or submersion of the bundle, is regarded as part of the structure of the bundle. The space is known as the total space of the fiber bundle, as the base space, and the fiber.
In mathematics, a principal bundle is a mathematical object that formalizes some of the essential features of the Cartesian product of a space with a group . In the same way as with the Cartesian product, a principal bundle is equipped with
An action of on , analogous to for a product space.
A projection onto . For a product space, this is just the projection onto the first factor, .
In mathematics, a frame bundle is a principal fiber bundle associated with any vector bundle . The fiber of over a point is the set of all ordered bases, or frames, for . The general linear group acts naturally on via a change of basis, giving the frame bundle the structure of a principal -bundle.
In mathematics, particularly differential geometry, a Finsler manifold is a differentiable manifold M where a (possibly asymmetric) Minkowski normF(x, −) is provided on each tangent space TxM, that enables one to define the length of any smooth curve γ : [a, b] → M as
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:
In differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. Connections are among the simplest methods of defining differentiation of the sections of vector bundles.
In differential geometry, the holonomy of a connection on a smooth manifold is the extent to which parallel transport around closed loops fails to preserve the geometrical data being transported. Holonomy is a general geometrical consequence of the curvature of the connection. For flat connections, the associated holonomy is a type of monodromy and is an inherently global notion. For curved connections, holonomy has nontrivial local and global features.
In differential geometry, a G-structure on an n-manifold M, for a given structure group G, is a principal G-subbundle of the tangent frame bundle FM (or GL(M)) of M.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.
In mathematics, the tautological one-form is a special 1-form defined on the cotangent bundle of a manifold In physics, it is used to create a correspondence between the velocity of a point in a mechanical system and its momentum, thus providing a bridge between Lagrangian mechanics and Hamiltonian mechanics.
In physics, a sigma model is a field theory that describes the field as a point particle confined to move on a fixed manifold. This manifold can be taken to be any Riemannian manifold, although it is most commonly taken to be either a Lie group or a symmetric space. The model may or may not be quantized. An example of the non-quantized version is the Skyrme model; it cannot be quantized due to non-linearities of power greater than 4. In general, sigma models admit (classical) topological soliton solutions, for example, the skyrmion for the Skyrme model. When the sigma field is coupled to a gauge field, the resulting model is described by Ginzburg–Landau theory. This article is primarily devoted to the classical field theory of the sigma model; the corresponding quantized theory is presented in the article titled "non-linear sigma model".
In differential geometry, a branch of mathematics, a Riemannian submersion is a submersion from one Riemannian manifold to another that respects the metrics, meaning that it is an orthogonal projection on tangent spaces.
In differential geometry, the notion of a metric tensor can be extended to an arbitrary vector bundle, and to some principal fiber bundles. This metric is often called a bundle metric, or fibre metric.
In mathematics, the Riemannian connection on a surface or Riemannian 2-manifold refers to several intrinsic geometric structures discovered by Tullio Levi-Civita, Élie Cartan and Hermann Weyl in the early part of the twentieth century: parallel transport, covariant derivative and connection form. These concepts were put in their current form with principal bundles only in the 1950s. The classical nineteenth century approach to the differential geometry of surfaces, due in large part to Carl Friedrich Gauss, has been reworked in this modern framework, which provides the natural setting for the classical theory of the moving frame as well as the Riemannian geometry of higher-dimensional Riemannian manifolds. This account is intended as an introduction to the theory of connections.
Lagrangian field theory is a formalism in classical field theory. It is the field-theoretic analogue of Lagrangian mechanics. Lagrangian mechanics is used to analyze the motion of a system of discrete particles each with a finite number of degrees of freedom. Lagrangian field theory applies to continua and fields, which have an infinite number of degrees of freedom.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.