In algebra, a split-complex number (or hyperbolic number, also perplex number, double number) is based on a hyperbolic unitj satisfying A split-complex number has two real number components x and y, and is written The conjugate of z is Since the product of a number z with its conjugate is an isotropic quadratic form.
The collection D of all split-complex numbers for forms an algebra over the field of real numbers. Two split-complex numbers w and z have a product wz that satisfies This composition of N over the algebra product makes (D, +, ×, *) a composition algebra.
A similar algebra based on and component-wise operations of addition and multiplication, where xy is the quadratic form on also forms a quadratic space. The ring isomorphism
relates proportional quadratic forms, but the mapping is not an isometry since the multiplicative identity (1, 1) of is at a distance from 0, which is normalized in D.
Split-complex numbers have many other names; see §Synonyms below. See the article Motor variable for functions of a split-complex number.
Definition
A split-complex number is an ordered pair of real numbers, written in the form
where x and y are real numbers and the hyperbolic unit[1]j satisfies
In the field of complex numbers the imaginary unit i satisfies The change of sign distinguishes the split-complex numbers from the ordinary complex ones. The hyperbolic unit j is not a real number but an independent quantity.
The collection of all such z is called the split-complex plane. Addition and multiplication of split-complex numbers are defined by
where and Here, the real part is defined by . Another expression for the squared modulus is then
Since it is not positive-definite, this bilinear form is not an inner product; nevertheless the bilinear form is frequently referred to as an indefinite inner product. A similar abuse of language refers to the modulus as a norm.
A split-complex number is invertible if and only if its modulus is nonzero (), thus numbers of the form x ± j x have no inverse. The multiplicative inverse of an invertible element is given by
Split-complex numbers which are not invertible are called null vectors. These are all of the form (a ± j a) for some real number a.
The diagonal basis
There are two nontrivial idempotent elements given by and Recall that idempotent means that and Both of these elements are null:
It is often convenient to use e and e∗ as an alternate basis for the split-complex plane. This basis is called the diagonal basis or null basis. The split-complex number z can be written in the null basis as
If we denote the number for real numbers a and b by (a, b), then split-complex multiplication is given by
The split-complex conjugate in the diagonal basis is given by and the squared modulus by
Isomorphism
This commutative diagram relates the action of the hyperbolic versor on D to squeeze mapping σ applied to
On the basis {e, e*} it becomes clear that the split-complex numbers are ring-isomorphic to the direct sum with addition and multiplication defined pairwise.
The diagonal basis for the split-complex number plane can be invoked by using an ordered pair (x, y) for and making the mapping
Now the quadratic form is Furthermore,
so the two parametrized hyperbolas are brought into correspondence with S.
Though lying in the same isomorphism class in the category of rings, the split-complex plane and the direct sum of two real lines differ in their layout in the Cartesian plane. The isomorphism, as a planar mapping, consists of a counter-clockwise rotation by 45° and a dilation by √2. The dilation in particular has sometimes caused confusion in connection with areas of a hyperbolic sector. Indeed, hyperbolic angle corresponds to area of a sector in the plane with its "unit circle" given by The contracted unit hyperbola of the split-complex plane has only half the area in the span of a corresponding hyperbolic sector. Such confusion may be perpetuated when the geometry of the split-complex plane is not distinguished from that of .
Geometry
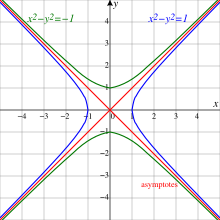
Unit hyperbola: ‖z‖ = 1
Conjugate hyperbola: ‖z‖ = −1
Asymptotes: ‖z‖ = 0
A two-dimensional real vector space with the Minkowski inner product is called (1 + 1)-dimensional Minkowski space, often denoted Just as much of the geometry of the Euclidean plane can be described with complex numbers, the geometry of the Minkowski plane can be described with split-complex numbers.
The set of points
is a hyperbola for every nonzero a in The hyperbola consists of a right and left branch passing through (a, 0) and (−a, 0). The case a = 1 is called the unit hyperbola. The conjugate hyperbola is given by
with an upper and lower branch passing through (0, a) and (0, −a). The hyperbola and conjugate hyperbola are separated by two diagonal asymptotes which form the set of null elements:
These two lines (sometimes called the null cone) are perpendicular in and have slopes ±1.
Split-complex numbers z and w are said to be hyperbolic-orthogonal if ⟨z, w⟩ = 0. While analogous to ordinary orthogonality, particularly as it is known with ordinary complex number arithmetic, this condition is more subtle. It forms the basis for the simultaneous hyperplane concept in spacetime.
The analogue of Euler's formula for the split-complex numbers is
This formula can be derived from a power series expansion using the fact that cosh has only even powers while that for sinh has odd powers.[2] For all real values of the hyperbolic angleθ the split-complex number λ = exp(jθ) has norm 1 and lies on the right branch of the unit hyperbola. Numbers such as λ have been called hyperbolic versors.
Since λ has modulus 1, multiplying any split-complex number z by λ preserves the modulus of z and represents a hyperbolic rotation (also called a Lorentz boost or a squeeze mapping). Multiplying by λ preserves the geometric structure, taking hyperbolas to themselves and the null cone to itself.
The set of all transformations of the split-complex plane which preserve the modulus (or equivalently, the inner product) forms a group called the generalized orthogonal groupO(1, 1). This group consists of the hyperbolic rotations, which form a subgroup denoted SO+(1, 1), combined with four discretereflections given by
and
The exponential map
sending θ to rotation by exp(jθ) is a group isomorphism since the usual exponential formula applies:
If a split-complex number z does not lie on one of the diagonals, then z has a polar decomposition.
The image of x in the quotient is the "imaginary" unit j. With this description, it is clear that the split-complex numbers form a commutative algebra over the real numbers. The algebra is not a field since the null elements are not invertible. All of the nonzero null elements are zero divisors.
Since addition and multiplication are continuous operations with respect to the usual topology of the plane, the split-complex numbers form a topological ring.
From the definition it is apparent that the ring of split-complex numbers is isomorphic to the group ring of the cyclic groupC2 over the real numbers
Matrix representations
One can easily represent split-complex numbers by matrices. The split-complex number can be represented by the matrix
Addition and multiplication of split-complex numbers are then given by matrix addition and multiplication. The squared modulus of z is given by the determinant of the corresponding matrix.
In fact there are many representations of the split-complex plane in the four-dimensional ring of 2x2 real matrices. The real multiples of the identity matrix form a real line in the matrix ring M(2,R). Any hyperbolic unit m provides a basis element with which to extend the real line to the split-complex plane. The matrices
which square to the identity matrix satisfy For example, when a = 0, then (b,c) is a point on the standard hyperbola. More generally, there is a hypersurface in M(2,R) of hyperbolic units, any one of which serves in a basis to represent the split-complex numbers as a subring of M(2,R).[3][bettersourceneeded]
The number can be represented by the matrix
History
The use of split-complex numbers dates back to 1848 when James Cockle revealed his tessarines.[4]William Kingdon Clifford used split-complex numbers to represent sums of spins. Clifford introduced the use of split-complex numbers as coefficients in a quaternion algebra now called split-biquaternions. He called its elements "motors", a term in parallel with the "rotor" action of an ordinary complex number taken from the circle group. Extending the analogy, functions of a motor variable contrast to functions of an ordinary complex variable.
Since the late twentieth century, the split-complex multiplication has commonly been seen as a Lorentz boost of a spacetime plane.[5][6][7][8][9][10] In that model, the number z = x + yj represents an event in a spatio-temporal plane, where x is measured in seconds and y in light-seconds. The future corresponds to the quadrant of events {z: |y| < x}, which has the split-complex polar decomposition . The model says that z can be reached from the origin by entering a frame of reference of rapiditya and waiting ρ nanoseconds. The split-complex equation
expressing products on the unit hyperbola illustrates the additivity of rapidities for collinear velocities. Simultaneity of events depends on rapidity a;
is the line of events simultaneous with the origin in the frame of reference with rapidity a.
Two events z and w are hyperbolic-orthogonal when Canonical events exp(aj) and j exp(aj) are hyperbolic orthogonal and lie on the axes of a frame of reference in which the events simultaneous with the origin are proportional to j exp(aj).
In 1933 Max Zorn was using the split-octonions and noted the composition algebra property. He realized that the Cayley–Dickson construction, used to generate division algebras, could be modified (with a factor gamma, γ) to construct other composition algebras including the split-octonions. His innovation was perpetuated by Adrian Albert, Richard D. Schafer, and others.[11] The gamma factor, with R as base field, builds split-complex numbers as a composition algebra. Reviewing Albert for Mathematical Reviews, N. H. McCoy wrote that there was an "introduction of some new algebras of order 2e over F generalizing Cayley–Dickson algebras."[12] Taking F = R and e = 1 corresponds to the algebra of this article.
In 1935 J.C. Vignaux and A. Durañona y Vedia developed the split-complex geometric algebra and function theory in four articles in Contribución a las Ciencias Físicas y Matemáticas, National University of La Plata, República Argentina (in Spanish). These expository and pedagogical essays presented the subject for broad appreciation.[13]
In 1941 E.F. Allen used the split-complex geometric arithmetic to establish the nine-point hyperbola of a triangle inscribed inzz∗ = 1.[14]
In 1956 Mieczyslaw Warmus published "Calculus of Approximations" in Bulletin de l’Académie polonaise des sciences (see link in References). He developed two algebraic systems, each of which he called "approximate numbers", the second of which forms a real algebra.[15]D. H. Lehmer reviewed the article in Mathematical Reviews and observed that this second system was isomorphic to the "hyperbolic complex" numbers, the subject of this article.
In 1961 Warmus continued his exposition, referring to the components of an approximate number as midpoint and radius of the interval denoted.
Synonyms
Different authors have used a great variety of names for the split-complex numbers. Some of these include:
(real) tessarines, James Cockle (1848)
(algebraic) motors, W.K. Clifford (1882)
hyperbolic complex numbers, J.C. Vignaux (1935), G. Cree (1949)[16]
In mathematics, the absolute value or modulus of a real number , denoted , is the non-negative value of without regard to its sign. Namely, if is a positive number, and if is negative, and . For example, the absolute value of 3 is 3, and the absolute value of −3 is also 3. The absolute value of a number may be thought of as its distance from zero.
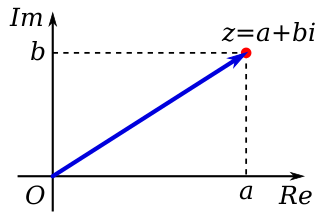
In mathematics, a complex number is an element of a number system that extends the real numbers with a specific element denoted i, called the imaginary unit and satisfying the equation ; every complex number can be expressed in the form , where a and b are real numbers. Because no real number satisfies the above equation, i was called an imaginary number by René Descartes. For the complex number ,a is called the real part, and b is called the imaginary part. The set of complex numbers is denoted by either of the symbols or C. Despite the historical nomenclature, "imaginary" complex numbers have a mathematical existence as firm as that of the real numbers, and they are fundamental tools in the scientific description of the natural world.
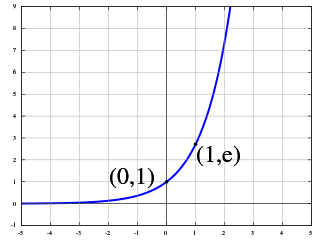
The exponential function is a mathematical function denoted by or . Unless otherwise specified, the term generally refers to the positive-valued function of a real variable, although it can be extended to the complex numbers or generalized to other mathematical objects like matrices or Lie algebras. The exponential function originated from the operation of taking powers of a number, but various modern definitions allow it to be rigorously extended to all real arguments , including irrational numbers. Its ubiquitous occurrence in pure and applied mathematics led mathematician Walter Rudin to consider the exponential function to be "the most important function in mathematics".
In mathematics, the quaternion number system extends the complex numbers. Quaternions were first described by the Irish mathematician William Rowan Hamilton in 1843 and applied to mechanics in three-dimensional space. The algebra of quaternions is often denoted by H, or in blackboard bold by Quaternions are not a field, because multiplication of quaternions is not, in general, commutative. Quaternions provide a definition of the quotient of two vectors in a three-dimensional space. Quaternions are generally represented in the form
The imaginary unit or unit imaginary number is a solution to the quadratic equation x2 + 1 = 0. Although there is no real number with this property, i can be used to extend the real numbers to what are called complex numbers, using addition and multiplication. A simple example of the use of i in a complex number is 2 + 3i.
In mathematics, the complex conjugate of a complex number is the number with an equal real part and an imaginary part equal in magnitude but opposite in sign. That is, if and are real numbers then the complex conjugate of is The complex conjugate of is often denoted as or .
In mathematics, the Cayley–Dickson construction, named after Arthur Cayley and Leonard Eugene Dickson, produces a sequence of algebras over the field of real numbers, each with twice the dimension of the previous one. The algebras produced by this process are known as Cayley–Dickson algebras, for example complex numbers, quaternions, and octonions. These examples are useful composition algebras frequently applied in mathematical physics.
In ring theory, a branch of abstract algebra, a quotient ring, also known as factor ring, difference ring or residue class ring, is a construction quite similar to the quotient group in group theory and to the quotient space in linear algebra. It is a specific example of a quotient, as viewed from the general setting of universal algebra. Starting with a ring and a two-sided ideal in , a new ring, the quotient ring , is constructed, whose elements are the cosets of in subject to special and operations.
In differential geometry and complex geometry, a complex manifold is a manifold with a complex structure, that is an atlas of charts to the open unit disc in the complex coordinate space , such that the transition maps are holomorphic.
In mathematics, complex multiplication (CM) is the theory of elliptic curves E that have an endomorphism ring larger than the integers. Put another way, it contains the theory of elliptic functions with extra symmetries, such as are visible when the period lattice is the Gaussian integer lattice or Eisenstein integer lattice.
In geometry, the relation of hyperbolic orthogonality between two lines separated by the asymptotes of a hyperbola is a concept used in special relativity to define simultaneous events. Two events will be simultaneous when they are on a line hyperbolically orthogonal to a particular timeline. This dependence on a certain timeline is determined by velocity, and is the basis for the relativity of simultaneity.
In abstract algebra, the biquaternions are the numbers w + xi + yj + zk, where w, x, y, and z are complex numbers, or variants thereof, and the elements of {1, i, j, k} multiply as in the quaternion group and commute with their coefficients. There are three types of biquaternions corresponding to complex numbers and the variations thereof:
In abstract algebra, the split-quaternions or coquaternions form an algebraic structure introduced by James Cockle in 1849 under the latter name. They form an associative algebra of dimension four over the real numbers.
In mathematics, a function of a motor variable is a function with arguments and values in the split-complex number plane, much as functions of a complex variable involve ordinary complex numbers. William Kingdon Clifford coined the term motor for a kinematic operator in his "Preliminary Sketch of Biquaternions" (1873). He used split-complex numbers for scalars in his split-biquaternions. Motor variable is used here in place of split-complex variable for euphony and tradition.
In mathematics, a versor is a quaternion of norm one. Each versor has the form
In abstract algebra, a bicomplex number is a pair (w, z) of complex numbers constructed by the Cayley–Dickson process that defines the bicomplex conjugate , and the product of two bicomplex numbers as
In geometry, the unit hyperbola is the set of points (x,y) in the Cartesian plane that satisfy the implicit equation In the study of indefinite orthogonal groups, the unit hyperbola forms the basis for an alternative radial length
In mathematics, the rational points on the unit circle are those points (x, y) such that both x and y are rational numbers ("fractions") and satisfy x2 + y2 = 1. The set of such points turns out to be closely related to primitive Pythagorean triples. Consider a primitive right triangle, that is, with integer side lengths a, b, c, with c the hypotenuse, such that the sides have no common factor larger than 1. Then on the unit circle there exists the rational point (a/c, b/c), which, in the complex plane, is just a/c + ib/c, where i is the imaginary unit. Conversely, if (x, y) is a rational point on the unit circle in the 1st quadrant of the coordinate system (i.e. x > 0, y > 0), then there exists a primitive right triangle with sides xc, yc, c, with c being the least common multiple of the denominators of x and y. There is a correspondence between points (a, b) in the x-y plane and points a + ib in the complex plane which is used below.
In the theory of Lie groups, the exponential map is a map from the Lie algebra of a Lie group to the group, which allows one to recapture the local group structure from the Lie algebra. The existence of the exponential map is one of the primary reasons that Lie algebras are a useful tool for studying Lie groups.
In mathematics, the set of positive real numbers, is the subset of those real numbers that are greater than zero. The non-negative real numbers, also include zero. Although the symbols and are ambiguously used for either of these, the notation or for and or for has also been widely employed, is aligned with the practice in algebra of denoting the exclusion of the zero element with a star, and should be understandable to most practicing mathematicians.
References
↑ Vladimir V. Kisil (2012) Geometry of Mobius Transformations: Elliptic, Parabolic, and Hyperbolic actions of SL(2,R), pages 2, 161, Imperial College Press ISBN978-1-84816-858-9
↑ F. Catoni, D. Boccaletti, R. Cannata, V. Catoni, E. Nichelatti, P. Zampetti. (2008) The Mathematics of Minkowski Space-Time, Birkhäuser Verlag, Basel. Chapter 4: Trigonometry in the Minkowski plane. ISBN978-3-7643-8613-9.
↑ Francesco Catoni; Dino Boccaletti; Roberto Cannata; Vincenzo Catoni; Paolo Zampetti (2011). "Chapter 2: Hyperbolic Numbers". Geometry of Minkowski Space-Time. Springer Science & Business Media. ISBN978-3-642-17977-8.
↑ N.H. McCoy (1942) Review of "Quadratic forms permitting composition" by A.A. Albert, Mathematical Reviews #0006140
↑ Vignaux, J.(1935) "Sobre el numero complejo hiperbolico y su relacion con la geometria de Borel", Contribucion al Estudio de las Ciencias Fisicas y Matematicas, Universidad Nacional de la Plata, Republica Argentina
Bencivenga, Uldrico (1946) "Sulla rappresentazione geometrica delle algebre doppie dotate di modulo", Atti della Reale Accademia delle Scienze e Belle-Lettere di Napoli, Ser (3) v.2 No7. MR0021123.
Walter Benz (1973) Vorlesungen uber Geometrie der Algebren, Springer
F. Reese Harvey. Spinors and calibrations. Academic Press, San Diego. 1990. ISBN0-12-329650-1. Contains a description of normed algebras in indefinite signature, including the Lorentz numbers.
C. Musès, "Hypernumbers II—Further concepts and computational applications", Appl. Math. Comput. 4 (1978) 45–66.
Olariu, Silviu (2002) Complex Numbers in N Dimensions, Chapter 1: Hyperbolic Complex Numbers in Two Dimensions, pages 1–16, North-Holland Mathematics Studies #190, ElsevierISBN0-444-51123-7.
Poodiack, Robert D. & Kevin J. LeClair (2009) "Fundamental theorems of algebra for the perplexes", The College Mathematics Journal 40(5):322–35.
Isaak Yaglom (1968) Complex Numbers in Geometry, translated by E. Primrose from 1963 Russian original, Academic Press, pp.18–20.
J. Rooney (2014). "Generalised Complex Numbers in Mechanics". In Marco Ceccarelli and Victor A. Glazunov (ed.). Advances on Theory and Practice of Robots and Manipulators: Proceedings of Romansy 2014 XX CISM-IFToMM Symposium on Theory and Practice of Robots and Manipulators. Mechanisms and Machine Science. Vol.22. Springer. pp.55–62. doi:10.1007/978-3-319-07058-2_7. ISBN978-3-319-07058-2.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.