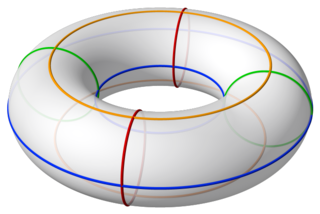
The notation for the circle group stems from the fact that, with the standard topology (see below), the circle group is a 1-torus. More generally, (the direct product of with itself times) is geometrically an -torus.
One way to think about the circle group is that it describes how to add angles, where only angles between 0° and 360° or or are permitted. For example, the diagram illustrates how to add 150° to 270°. The answer is 150° + 270° = 420°, but when thinking in terms of the circle group, we may "forget" the fact that we have wrapped once around the circle. Therefore, we adjust our answer by 360°, which gives 420° ≡ 60° (mod 360°).
Another description is in terms of ordinary (real) addition, where only numbers between 0 and 1 are allowed (with 1 corresponding to a full rotation: 360° or ), i.e. the real numbers modulo the integers: . This can be achieved by throwing away the digits occurring before the decimal point. For example, when we work out 0.4166... + 0.75, the answer is 1.1666..., but we may throw away the leading 1, so the answer (in the circle group) is just with some preference to 0.166..., because .
Topological and analytic structure
The circle group is more than just an abstract algebraic object. It has a natural topology when regarded as a subspace of the complex plane. Since multiplication and inversion are continuous functions on , the circle group has the structure of a topological group. Moreover, since the unit circle is a closed subset of the complex plane, the circle group is a closed subgroup of (itself regarded as a topological group).
One can say even more. The circle is a 1-dimensional real manifold, and multiplication and inversion are real-analytic maps on the circle. This gives the circle group the structure of a one-parameter group, an instance of a Lie group. In fact, up to isomorphism, it is the unique 1-dimensional compact, connected Lie group. Moreover, every -dimensional compact, connected, abelian Lie group is isomorphic to .
Isomorphisms
The circle group shows up in a variety of forms in mathematics. We list some of the more common forms here. Specifically, we show that
The set of all 1×1 unitary matrices clearly coincides with the circle group; the unitary condition is equivalent to the condition that its element have absolute value1. Therefore, the circle group is canonically isomorphic to , the first unitary group.
The last equality is Euler's formula or the complex exponential. The real number θ corresponds to the angle (in radians) on the unit circle as measured counterclockwise from the positive xaxis. That this map is a homomorphism follows from the fact that the multiplication of unit complex numbers corresponds to addition of angles:
This isomorphism has the geometric interpretation that multiplication by a unit complex number is a proper rotation in the complex (and real) plane, and every such rotation is of this form.
Properties
Every compact Lie group of dimension>0 has a subgroup isomorphic to the circle group. This means that, thinking in terms of symmetry, a compact symmetry group acting continuously can be expected to have one-parameter circle subgroups acting; the consequences in physical systems are seen, for example, at rotational invariance and spontaneous symmetry breaking.
The circle group has many subgroups, but its only proper closed subgroups consist of roots of unity: For each integer , the -th roots of unity form a cyclic group of order, which is unique up to isomorphism.
The representations of the circle group are easy to describe. It follows from Schur's lemma that the irreduciblecomplex representations of an abelian group are all 1-dimensional. Since the circle group is compact, any representation
must take values in . Therefore, the irreducible representations of the circle group are just the homomorphisms from the circle group to itself.
For each integer we can define a representation of the circle group by . These representations are all inequivalent. The representation is conjugate to :
The number of copies of must be (the cardinality of the continuum) in order for the cardinality of the direct sum to be correct. But the direct sum of copies of is isomorphic to , as is a vector space of dimension over . Thus
The isomorphism
can be proved in the same way, since is also a divisible abelian group whose torsion subgroup is the same as the torsion subgroup of .
In mathematical physics and mathematics, the Pauli matrices are a set of three 2 × 2 complex matrices that are Hermitian, involutory and unitary. Usually indicated by the Greek letter sigma, they are occasionally denoted by tau when used in connection with isospin symmetries.
In geometry, a torus is a surface of revolution generated by revolving a circle in three-dimensional space one full revolution about an axis that is coplanar with the circle. The main types of toruses include ring toruses, horn toruses, and spindle toruses. A ring torus is sometimes colloquially referred to as a donut or doughnut.
In linear algebra, an orthogonal matrix, or orthonormal matrix, is a real square matrix whose columns and rows are orthonormal vectors.
In linear algebra, an invertible complex square matrix U is unitary if its matrix inverse U−1 equals its conjugate transpose U*, that is, if
In mathematics, a unit vector in a normed vector space is a vector of length 1. A unit vector is often denoted by a lowercase letter with a circumflex, or "hat", as in .
In mathematics, the orthogonal group in dimension n, denoted O(n), is the group of distance-preserving transformations of a Euclidean space of dimension n that preserve a fixed point, where the group operation is given by composing transformations. The orthogonal group is sometimes called the general orthogonal group, by analogy with the general linear group. Equivalently, it is the group of n × n orthogonal matrices, where the group operation is given by matrix multiplication (an orthogonal matrix is a real matrix whose inverse equals its transpose). The orthogonal group is an algebraic group and a Lie group. It is compact.
In mechanics and geometry, the 3D rotation group, often denoted SO(3), is the group of all rotations about the origin of three-dimensional Euclidean space under the operation of composition.
In mathematics, the special unitary group of degree n, denoted SU(n), is the Lie group of n × n unitary matrices with determinant 1.
In mathematics, the conjugate transpose, also known as the Hermitian transpose, of an complex matrix is an matrix obtained by transposing and applying complex conjugation to each entry. There are several notations, such as or , , or .
In physics and mathematics, the Lorentz group is the group of all Lorentz transformations of Minkowski spacetime, the classical and quantum setting for all (non-gravitational) physical phenomena. The Lorentz group is named for the Dutch physicist Hendrik Lorentz.
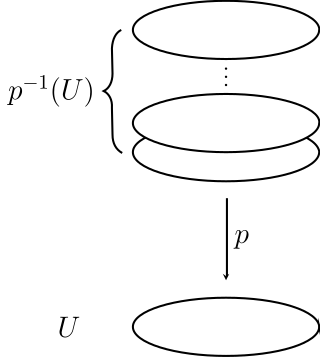
In topology, a covering or covering projection is a map between topological spaces that, intuitively, locally acts like a projection of multiple copies of a space onto itself. In particular, coverings are special types of local homeomorphisms. If is a covering, is said to be a covering space or cover of , and is said to be the base of the covering, or simply the base. By abuse of terminology, and may sometimes be called covering spaces as well. Since coverings are local homeomorphisms, a covering space is a special kind of étale space.
In mathematics, a principal bundle is a mathematical object that formalizes some of the essential features of the Cartesian product of a space with a group . In the same way as with the Cartesian product, a principal bundle is equipped with
An action of on , analogous to for a product space.
A projection onto . For a product space, this is just the projection onto the first factor, .
Rotation in mathematics is a concept originating in geometry. Any rotation is a motion of a certain space that preserves at least one point. It can describe, for example, the motion of a rigid body around a fixed point. Rotation can have a sign (as in the sign of an angle): a clockwise rotation is a negative magnitude so a counterclockwise turn has a positive magnitude. A rotation is different from other types of motions: translations, which have no fixed points, and (hyperplane) reflections, each of them having an entire (n − 1)-dimensional flat of fixed points in a n-dimensional space.
An infinitesimal rotation matrix or differential rotation matrix is a matrix representing an infinitely small rotation.
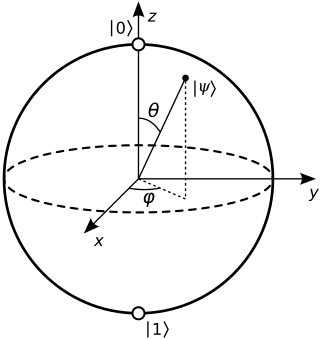
In quantum mechanics and computing, the Bloch sphere is a geometrical representation of the pure state space of a two-level quantum mechanical system (qubit), named after the physicist Felix Bloch.
In linear algebra, a rotation matrix is a transformation matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix
In mathematics, the group of rotations about a fixed point in four-dimensional Euclidean space is denoted SO(4). The name comes from the fact that it is the special orthogonal group of order 4.
In geometry, various formalisms exist to express a rotation in three dimensions as a mathematical transformation. In physics, this concept is applied to classical mechanics where rotational kinematics is the science of quantitative description of a purely rotational motion. The orientation of an object at a given instant is described with the same tools, as it is defined as an imaginary rotation from a reference placement in space, rather than an actually observed rotation from a previous placement in space.
In mathematics, the classical groups are defined as the special linear groups over the reals , the complex numbers and the quaternions together with special automorphism groups of symmetric or skew-symmetric bilinear forms and Hermitian or skew-Hermitian sesquilinear forms defined on real, complex and quaternionic finite-dimensional vector spaces. Of these, the complex classical Lie groups are four infinite families of Lie groups that together with the exceptional groups exhaust the classification of simple Lie groups. The compact classical groups are compact real forms of the complex classical groups. The finite analogues of the classical groups are the classical groups of Lie type. The term "classical group" was coined by Hermann Weyl, it being the title of his 1939 monograph The Classical Groups.
In mathematics, the special linear group SL(2, R) or SL2(R) is the group of 2 × 2 real matrices with determinant one:
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.