Geometric inversion of a torus, cylinder or double cone
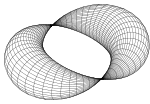
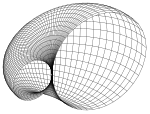
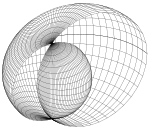
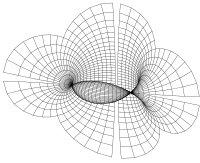
A Dupin cyclide
In mathematics, a Dupin cyclide or cyclide of Dupin is any geometric inversion of a standard torus, cylinder or double cone. In particular, these latter are themselves examples of Dupin cyclides. They were discovered by (and named after) Charles Dupin in his 1803 dissertation under Gaspard Monge.[1] The key property of a Dupin cyclide is that it is a channel surface (envelope of a one-parameter family of spheres) in two different ways. This property means that Dupin cyclides are natural objects in Lie sphere geometry.
Dupin cyclides are often simply known as cyclides, but the latter term is also used to refer to a more general class of quartic surfaces which are important in the theory of separation of variables for the Laplace equation in three dimensions.
Dupin cyclides are used in computer-aided design because cyclide patches have rational representations and are suitable for blending canal surfaces (cylinder, cones, tori, and others).
Definitions and properties
There are several equivalent definitions of Dupin cyclides. In , they can be defined as the images under any inversion of tori, cylinders and double cones. This shows that the class of Dupin cyclides is invariant under Möbius (or conformal) transformations. In complex space these three latter varieties can be mapped to one another by inversion, so Dupin cyclides can be defined as inversions of the torus (or the cylinder, or the double cone).
Since a standard torus is the orbit of a point under a two dimensional abeliansubgroup of the Möbius group, it follows that the cyclides also are, and this provides a second way to define them.
A third property which characterizes Dupin cyclides is that their curvature lines are all circles (possibly through the point at infinity). Equivalently, the curvature spheres, which are the spheres tangent to the surface with radii equal to the reciprocals of the principal curvatures at the point of tangency, are constant along the corresponding curvature lines: they are the tangent spheres containing the corresponding curvature lines as great circles. Equivalently again, both sheets of the focal surface degenerate to conics.[2] It follows that any Dupin cyclide is a channel surface (i.e., the envelope of a one-parameter family of spheres) in two different ways, and this gives another characterization.
The definition in terms of spheres shows that the class of Dupin cyclides is invariant under the larger group of all Lie sphere transformations; any two Dupin cyclides are Lie-equivalent. They form (in some sense) the simplest class of Lie-invariant surfaces after the spheres, and are therefore particularly significant in Lie sphere geometry.[3]
The definition also means that a Dupin cyclide is the envelope of the one-parameter family of spheres tangent to three given mutually tangent spheres. It follows that it is tangent to infinitely many Soddy's hexlet configurations of spheres.
Parametric and implicit representation
(CS): A Dupin cyclide can be represented in two ways as the envelope of a one parametric pencil of spheres, i.e. it is a canal surface with two directrices. The pair of directrices are focal conics and consists either of an ellipse and a hyperbola or of two parabolas. In the first case one defines the cyclide as elliptic, in the second case as parabolic. In both cases the conics are contained in two mutually orthogonal planes. In extreme cases (if the ellipse is a circle) the hyperbola degenerates to a line and the cyclide is a torus of revolution.
A further special property of a cyclide is:
(CL): Any curvature line of a Dupin cyclide is a circle.
Elliptic cyclides
An elliptic cyclide can be represented parametrically by the following formulas (see section Cyclide as channel surface):
Meanings of the design parameters : is the radius of the generating sphere at the co-vertices of the ellipse The two circles in the x-z-plane with centers have radii . Here: and
The numbers are the semi major and semi minor axes and the linear eccentricity of the ellipse:
The hyperbola is the focal conic to the ellipse. That means: The foci/vertices of the ellipse are the vertices/foci of the hyperbola. The two conics form the two degenerated focal surfaces of the cyclide.
can be considered as the average radius of the generating spheres.
For , respectively one gets the curvature lines (circles) of the surface.
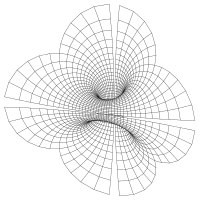
A parabolic cyclide can be represented by the following parametric representation (see section Cyclide as channel surface):
parabolic cyclide with its directrices (focal parabolas)
The number determines the shape of both the parabolas, which are focal conics:
and
determines the relation of the diameters of the two holes (see diagram). means: both diameters are equal. For the diagram is .
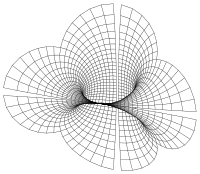
A corresponding implicit representation is
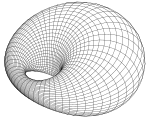
parabolic Dupin cyclides for designparameters p=1, k
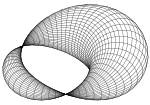
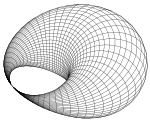
ring cyclide
horn cyclide
horn cyclide
Remark: By displaying the circles there appear gaps which are caused by the necessary restriction of the parameters .
Cyclide as channel surface
Dupin cyclide as channel surface (envelope of a family of spheres)
There are two ways to generate an elliptic Dupin cyclide as a channel surface. The first one uses an ellipse as directrix, the second one a hyperbola:[4]
Ellipse as directrix
In the x-y-plane the directrix is the ellipse with equation
and .
It has the parametric representation
is the semi major and the semi minor axis. is the linear eccentricity of the ellipse. Hence: . The radii of the generating spheres are
is a design parameter. It can be seen as the average of the radii of the spheres. In case of the ellipse is a circle and the cyclide a torus of revolution with the radius of the generating circle (generatrix).
In the diagram: .
Maxwell: Property of the foci of the directrix ellipse. The ellipse is the equidistant set of the blue and purple circles.
Maxwell property
The following simple relation between the actual sphere center (ellipse point) and the corresponding sphere radius is due to Maxwell:[5]
The difference/sum of the sphere's radius and the distance of the sphere's center (ellipse point) from one (but fixed) of the foci is constant.
Proof
The foci of the ellipse are . If one chooses and calculates the distance , one gets . Together with the radius of the actual sphere (see above) one gets . Choosing the other focus yields:
Hence:
In the x-y-plane the envelopes of the circles of the spheres are two circles with the foci of the ellipse as centers and the radii (see diagram).
Cyclide through 4 points on the x-axis
Determining the design parameters a,b,c,d belonging to the given reals top: ring cyclide with middle: horn cyclide with bottom: spindel cyclide with
The Maxwell-property gives reason for determining a ring cyclide by prescribing its intersections with the x-axis:
Given: Four points on the x-axis (see diagram).
Wanted: Center , semiaxes , linear eccentricity and foci of the directrix ellipse and the parameter of the corresponding ring cyclide.
From the Maxwell-property one derives
Solving for yields
The foci (on the x-axis) are
and hence
The center of the focal conics (ellipse and hyperbola) has the x-coordinate
If one wants to display the cyclide with help of the parametric representation above one has to consider the shift of the center!
Meaning of the order of the numbers
(The calculation above presumes , see diagram.)
(H) Swapping generates a horn cyclide. (S) Swapping , generates a spindel cyclide. (H1) For one gets a 1-horn cyclide. (R) For one gets a ring cyclide touching itself at the origin.
Parallel surfaces
Parallel surfaces of a ring cyclide with parameters
By increasing or decreasing parameter , such that the type does not change, one gets parallel surfaces (similar to parallel curves) of the same type (see diagram).
Hyperbola as directrix
The second way to generate the ring cyclide as channel surface uses the focal hyperbola as directrix. It has the equation
Cyclide with two touching spheres with centers on the directrix hyperbola
In this case the spheres touch the cyclide from outside at the second family of circles (curvature lines). To each arm of the hyperbola belongs a subfamily of circles. The spheres of one family enclose the cyclide (in diagram: purple). Spheres of the other family are touched from outside by the cyclide (blue).
Parametric representation of the hyperbola:
The radii of the corresponding spheres are
In case of a torus () the hyperbola degenerates into the axis of the torus.
Maxwell-property for the hyperbola case. The hyperbola arm is an equidistant curve of both the grey circles.
Maxwell-property (hyperbola case)
The foci of the hyperbola are . The distance of hyperbola point to the focus is and together with the sphere radius one gets . Analogously one gets . For a point on the second arm of the hyperbola one derives the equations:
Hence:
In the x-z-plane the circles of the spheres with centers and radii have the two circles (in diagram grey) with centers and radii as envelopes.
Point construction
Derivation of the parametric representation
Elliptic cyclide
The ellipse and hyperbola (focal conics) are the degenerated focal surfaces of the elliptic cyclide. For any pair of points of the ellipse and hyperbola the following is true (because of the definition of a focal surface):
1) The line is a normal of the cyclide and
2) the corresponding point of the cyclide divides the chord with relation (see diagram).
From the parametric representation of the focal conics and the radii of the spheres
Ellipse:
Hyperbola:
one gets the corresponding point of the cyclide (see diagram):
(For the unusual but convenient parametric representation of the hyperbola: see hyperbola.)
Calculation in detail leads to the parametric representation of the elliptic cyclide given above.
If one uses the parametric representation given in the article on channel surfaces, then, in general, only one family of parametric curves consists of circles.
Parabolic cyclide
Generation of a parabolic cyclide as channel surface
The derivation of the parametric representation for the parabolic case runs analogously:
With the parametric representations of the focal parabolas (degenerated focal surfaces) and the radii of the spheres:
one gets
which provides the parametric representation above of a parabolic cyclide.
Dupin cyclides and geometric inversions
An advantage for investigations of cyclides is the property:
The inversion at the sphere with equation can be described analytically by:
The most important properties of an inversion at a sphere are:
Spheres and circles are mapped on the same objects.
Planes and lines containing the origin (center of inversion) are mapped on themselves.
Planes and lines not containing the origin are mapped on spheres or circles passing the origin.
An inversion is involutory (identical with the inverse mapping).
An inversion preserves angles.
One can map arbitrary surfaces by an inversion. The formulas above give in any case parametric or implicit representations of the image surface, if the surfaces are given parametrically or implicitly. In case of a parametric surface one gets:
ring cyclide generated by an inversion of a cylinder at a sphere (magenta)parabolic ring cyclide generated by an inversion of a cylinder containing the originhorn cyclide generated by an inversion of a conering cyclide generated by an inversion of a torus
But: Only in case of right circular cylinders and cones and tori of revolution one gets Dupin cyclides and vice versa.
Example cylinder
a) Because lines, which do not contain the origin, are mapped by an inversion at a sphere (in picture: magenta) on circles containing the origin the image of the cylinder is a ring cyclide with mutually touching circles at the origin. As the images of the line segments, shown in the picture, there appear on line circle segments as images. The spheres which touch the cylinder on the inner side are mapped on a first pencil of spheres which generate the cyclide as a canal surface. The images of the tangent planes of the cylinder become the second pencil of spheres touching the cyclide. The latter ones pass through the origin. b) The second example inverses a cylinder that contains the origin. Lines passing the origin are mapped onto themselves. Hence the surface is unbounded and a parabolic cyclide.
Example cone
The lines generating the cone are mapped on circles, which intersect at the origin and the image of the cone's vertex. The image of the cone is a double horn cyclide. The picture shows the images of the line segments (of the cone), which are circles segments, actually.
Example torus
Both the pencils of circles on the torus (shown in the picture) are mapped on the corresponding pencils of circles on the cyclide. In case of a self-intersecting torus one would get a spindle cyclide.
Villarceau circles
Ring cyclide with Villarceau-circles
Because Dupin ring-cyclides can be seen as images of tori via suitable inversions and an inversion maps a circle onto a circle or line, the images of the Villarceau circles form further two families of circles on a cyclide (see diagram).
Determining the designparameters
The formula of the inversion of a parametric surface (see above) provides a parametric representation of a cyclide (as inversion of a torus) with circles as parametric curves. But the points of a parametric net are not well distributed. So it is better to calculate the design parameters and to use the parametric representation above:
Cyclide (blue) as image by an inversion of a torus (black) at the unit sphere (red)
Given: A torus, which is shifted out of the standard position along the x-axis. Let be the intersections of the torus with the x-axis (see diagram). All not zero. Otherwise the inversion of the torus would not be a ring-cyclide. Wanted: semi-axes and linear eccentricity of the ellipse (directrix) and parameter of the ring-cyclide, which is the image of the torus under the inversion at the unitsphere.
The inversion maps onto , which are the x-coordinates of 4 points of the ring-cyclide (see diagram). From section Cyclide through 4 points on the x-axis one gets
and
The center of the focal conics has the x-ccordinate
Separation of variables
Dupin cyclides are a special case of a more general notion of a cyclide, which is a natural extension of the notion of a quadric surface. Whereas a quadric can be described as the zero-set of second order polynomial in Cartesian coordinates (x1,x2,x3), a cyclide is given by the zero-set of a second order polynomial in (x1,x2,x3,r2), where r2=x12+x22+x32. Thus it is a quartic surface in Cartesian coordinates, with an equation of the form:
where Q is a 3x3 matrix, P and R are a 3-dimensional vectors, and A and B are constants.[6]
Families of cyclides give rise to various cyclidic coordinate geometries.
In Maxime Bôcher's 1891 dissertation, Ueber die Reihenentwickelungen der Potentialtheorie, it was shown that the Laplace equation in three variables can be solved using separation of variables in 17 conformally distinct quadric and cyclidic coordinate geometries. Many other cyclidic geometries can be obtained by studying R-separation of variables for the Laplace equation.[7]
In mathematics, an ellipse is a plane curve surrounding two focal points, such that for all points on the curve, the sum of the two distances to the focal points is a constant. It generalizes a circle, which is the special type of ellipse in which the two focal points are the same. The elongation of an ellipse is measured by its eccentricity , a number ranging from to .
In mathematics, a hyperbola is a type of smooth curve lying in a plane, defined by its geometric properties or by equations for which it is the solution set. A hyperbola has two pieces, called connected components or branches, that are mirror images of each other and resemble two infinite bows. The hyperbola is one of the three kinds of conic section, formed by the intersection of a plane and a double cone. If the plane intersects both halves of the double cone but does not pass through the apex of the cones, then the conic is a hyperbola.
A sphere is a geometrical object that is a three-dimensional analogue to a two-dimensional circle. A sphere is the set of points that are all at the same distance r from a given point in three-dimensional space. That given point is the centre of the sphere, and r is the sphere's radius. The earliest known mentions of spheres appear in the work of the ancient Greek mathematicians.
An ellipsoid is a surface that may be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
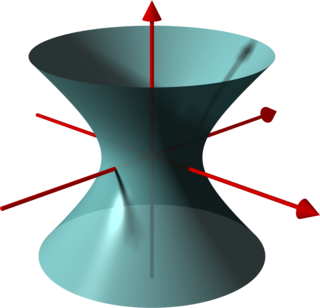
In geometry, a hyperboloid of revolution, sometimes called a circular hyperboloid, is the surface generated by rotating a hyperbola around one of its principal axes. A hyperboloid is the surface obtained from a hyperboloid of revolution by deforming it by means of directional scalings, or more generally, of an affine transformation.
A hyperbolic spiral is a plane curve, which can be described in polar coordinates by the equation
In geometry, the lemniscate of Bernoulli is a plane curve defined from two given points F1 and F2, known as foci, at distance 2c from each other as the locus of points P so that PF1·PF2 = c2. The curve has a shape similar to the numeral 8 and to the ∞ symbol. Its name is from lemniscatus, which is Latin for "decorated with hanging ribbons". It is a special case of the Cassini oval and is a rational algebraic curve of degree 4.
In geometry, inversive geometry is the study of inversion, a transformation of the Euclidean plane that maps circles or lines to other circles or lines and that preserves the angles between crossing curves. Many difficult problems in geometry become much more tractable when an inversion is applied. Inversion seems to have been discovered by a number of people contemporaneously, including Steiner (1824), Quetelet (1825), Bellavitis (1836), Stubbs and Ingram (1842-3) and Kelvin (1845).
In mathematics, a parametric equation defines a group of quantities as functions of one or more independent variables called parameters. Parametric equations are commonly used to express the coordinates of the points that make up a geometric object such as a curve or surface, in which case the equations are collectively called a parametric representation or parameterization of the object.
In quantum mechanics and computing, the Bloch sphere is a geometrical representation of the pure state space of a two-level quantum mechanical system (qubit), named after the physicist Felix Bloch.
A cone is a three-dimensional geometric shape that tapers smoothly from a flat base to a point called the apex or vertex.
A cylinder has traditionally been a three-dimensional solid, one of the most basic of curvilinear geometric shapes. In elementary geometry, it is considered a prism with a circle as its base.
In geometry and topology, a channel or canal surface is a surface formed as the envelope of a family of spheres whose centers lie on a space curve, its directrix. If the radii of the generating spheres are constant, the canal surface is called a pipe surface. Simple examples are:
In inversive geometry, an inverse curve of a given curve C is the result of applying an inverse operation to C. Specifically, with respect to a fixed circle with center O and radius k the inverse of a point Q is the point P for which P lies on the ray OQ and OP·OQ = k2. The inverse of the curve C is then the locus of P as Q runs over C. The point O in this construction is called the center of inversion, the circle the circle of inversion, and k the radius of inversion.
In mathematics, a conic section, quadratic curve or simply conic is a curve obtained as the intersection of the surface of a cone with a plane. The three types of conic section are the hyperbola, the parabola, and the ellipse; the circle is a special case of the ellipse, though historically it was sometimes called a fourth type. The ancient Greek mathematicians studied conic sections, culminating around 200 BC with Apollonius of Perga's systematic work on their properties.
In the geometry of curves, an orthoptic is the set of points for which two tangents of a given curve meet at a right angle.
In geometry, an intersection is a point, line, or curve common to two or more objects. The simplest case in Euclidean geometry is the line–line intersection between two distinct lines, which either is one point or does not exist. Other types of geometric intersection include:
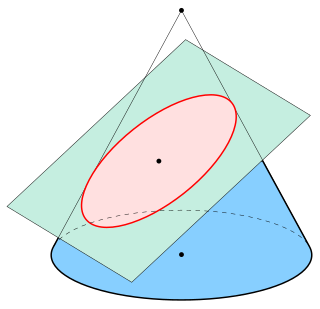
In geometry, focal conics are a pair of curves consisting of either
In differential geometry Dupin's theorem, named after the French mathematician Charles Dupin, is the statement:
In triangle geometry, a triangle conic is a conic in the plane of the reference triangle and associated with it in some way. For example, the circumcircle and the incircle of the reference triangle are triangle conics. Other examples are the Steiner ellipse which is an ellipse passing through the vertices and having its centre at the centroid of the reference triangle, the Kiepert hyperbola which is a conic passing through the vertices, the centroid and the orthocentre of the reference triangle and the Artzt parabolas which are parabolas touching two sidelines of the reference triangle at vertices of the triangle. The terminology of triangle conic is widely used in the literature without a formal definition,that is, without precisely formulating the relations a conic should have with the reference triangle so as to qualify it to be called a triangle conic (see,). WolframMathWorld has a page titled "Triangle conics" which gives a list of 42 items without giving a definition of triangle conic. However, Paris Pamfilos in his extensive collection of topics in geometry and topics in other fields related to geometry defines a triangle conic as a "conic circumscribing a triangle ABC or inscribed in a triangle ". The terminology triangle circle is used to denote a circle associated with the reference triangle is some way.
References
Cecil, Thomas E. (1992), Lie sphere geometry, New York: Universitext, Springer-Verlag, ISBN978-0-387-97747-8 .
Eisenhart, Luther P. (1960), "§133 Cyclides of Dupin", A Treatise on the Differential Geometry of Curves and Surfaces, New York: Dover, pp.312–314.
Moon, Parry; Spencer, Domina Eberle (1961), Field Theory Handbook: including coordinate systems, differential equations, and their solutions, Springer, ISBN0-387-02732-7 .
M. J. Pratt (1989) Cyclide Blending in Solid Modelling. In: Wolfgang Strasser, Hans-Peter Seidel (Hrsg.): Theory and Practice in Geometric Modelling. Springer-Verlag, ISBN0-387-51472-4, p.235.
Y. L. Srinivas, V. Kumar, D. Dutta (1996) "Surface design using cyclide patches", Computer-Aided Design 28(4): 263–276.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.



![Meanings of the design parameters
a
,
b
,
c
,
d
{\displaystyle a,b,c,d}
:
d
{\displaystyle d}
is the radius of the generating sphere at the co-vertices of the ellipse
The two circles in the x-z-plane with centers
(
+-
a
,
0
,
0
)
{\displaystyle (\pm a,0,0)}
have radii
d
[?]
c
{\displaystyle d\mp c}
.
Here:
a
=
1
,
b
=
0.98
-
c
=
0.199
{\displaystyle a=1,\;b=0.98\to c=0.199}
and
d
=
0.3
{\displaystyle d=0.3} Zyklide-el-hy-def.svg](http://upload.wikimedia.org/wikipedia/commons/thumb/9/94/Zyklide-el-hy-def.svg/290px-Zyklide-el-hy-def.svg.png)