| Cone | |
|---|---|
 A right circular cone with the radius of its base r, its height h, its slant height c and its angle θ. | |
| Type | Solid figure |
| Faces | 1 circular face and 1 conic surface |
| Euler char. | 2 |
| Symmetry group | O(2) |
| Surface area | π r2 + π rℓ |
| Volume | (π r2h)/3 |

In geometry, a cone is a three-dimensional figure that tapers smoothly from a flat base (typically a circle) to a point not contained in the base, called the apex or vertex .
Contents
- Further terminology
- Measurements and equations
- Volume
- Center of mass
- Right circular cone
- Projective geometry
- Generalizations
- See also
- Notes
- References
- External links
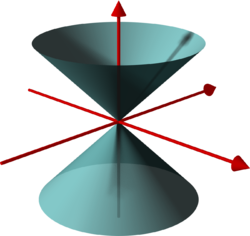
A cone is formed by a set of line segments, half-lines, or lines connecting a common point, the apex, to all of the points on a base. In the case of line segments, the cone does not extend beyond the base, while in the case of half-lines, it extends infinitely far. In the case of lines, the cone extends infinitely far in both directions from the apex, in which case it is sometimes called a double cone. Each of the two halves of a double cone split at the apex is called a nappe.
Depending on the author, the base may be restricted to a circle, any one-dimensional quadratic form in the plane, any closed one-dimensional figure, or any of the above plus all the enclosed points. If the enclosed points are included in the base, the cone is a solid object; otherwise it is an open surface, a two-dimensional object in three-dimensional space. In the case of a solid object, the boundary formed by these lines or partial lines is called the lateral surface; if the lateral surface is unbounded, it is a conical surface .
The axis of a cone is the straight line passing through the apex about which the cone has a circular symmetry. In common usage in elementary geometry, cones are assumed to be right circular, i.e., with a circle base perpendicular to the axis. [1] If the cone is right circular the intersection of a plane with the lateral surface is a conic section. In general, however, the base may be any shape [2] and the apex may lie anywhere (though it is usually assumed that the base is bounded and therefore has finite area, and that the apex lies outside the plane of the base). Contrasted with right cones are oblique cones, in which the axis passes through the centre of the base non-perpendicularly. [3]
Depending on context, cone may refer more narrowly to either a convex cone or projective cone. Cones can be generalized to higher dimensions.

![Proof without words that the volume of a cone is a third of a cylinder of equal diameter and height
1.
A cone and a cylinder have radius r and height h.
2.
The volume ratio is maintained when the height is scaled to h' = r [?]p.
3.
Decompose it into thin slices.
4.
Using Cavalieri's principle, reshape each slice into a square of the same area.
5.
The pyramid is replicated twice.
6.
Combining them into a cube shows that the volume ratio is 1:3. Visual proof cone volume.svg](http://upload.wikimedia.org/wikipedia/commons/thumb/3/3c/Visual_proof_cone_volume.svg/250px-Visual_proof_cone_volume.svg.png)














































