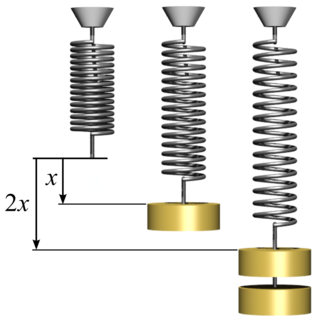
1-dimension example
In the tension-compression problem, the following equation shows the relationship between displacement u and force P:  where L is length, A is the area of a cross-section, and E is Young's modulus.
where L is length, A is the area of a cross-section, and E is Young's modulus.
If the Young's modulus and force are uncertain, then 
To find upper and lower bounds of the displacement u, calculate the following partial derivatives: 

Calculate extreme values of the displacement as follows: 

Calculate strain using following formula: 
Calculate derivative of the strain using derivative from the displacements: 

Calculate extreme values of the displacement as follows: 

It is also possible to calculate extreme values of strain using the displacements  then
then 

The same methodology can be applied to the stress  then
then 
 and
and 

If we treat stress as a function of strain then  then
then 

Structure is safe if stress  is smaller than a given value
is smaller than a given value  i.e.,
i.e.,  this condition is true if
this condition is true if 
After calculation we know that this relation is satisfied if 
The example is very simple but it shows the applications of the interval parameters in mechanics. Interval FEM use very similar methodology in multidimensional cases [Pownuk 2004].
However, in the multidimensional cases relation between the uncertain parameters and the solution is not always monotone. In those cases, more complicated optimization methods have to be applied. [1]
Multidimensional example
In the case of tension-compression problem the equilibrium equation has the following form  where u is displacement, E is Young's modulus, A is an area of cross-section, and n is a distributed load. In order to get unique solution it is necessary to add appropriate boundary conditions e.g.
where u is displacement, E is Young's modulus, A is an area of cross-section, and n is a distributed load. In order to get unique solution it is necessary to add appropriate boundary conditions e.g. 

If Young's modulus E and n are uncertain then the interval solution can be defined in the following way

For each FEM element it is possible to multiply the equation by the test function v where
where 
After integration by parts we will get the equation in the weak form  where
where
Let's introduce a set of grid points  , where
, where  is a number of elements, and linear shape functions for each FEM element
is a number of elements, and linear shape functions for each FEM element  where
where 
 left endpoint of the element, left endpoint of the element number "e". Approximate solution in the "e"-th element is a linear combination of the shape functions
left endpoint of the element, left endpoint of the element number "e". Approximate solution in the "e"-th element is a linear combination of the shape functions

After substitution to the weak form of the equation we will get the following system of equations
 or in the matrix form
or in the matrix form 
In order to assemble the global stiffness matrix it is necessary to consider an equilibrium equations in each node. After that the equation has the following matrix form  where
where  is the global stiffness matrix,
is the global stiffness matrix,  is the solution vector,
is the solution vector,  is the right hand side.
is the right hand side.
In the case of tension-compression problem

If we neglect the distributed load n

After taking into account the boundary conditions the stiffness matrix has the following form

Right-hand side has the following form

Let's assume that Young's modulus E, area of cross-section A and the load P are uncertain and belong to some intervals 


The interval solution can be defined calculating the following way

Calculation of the interval vector  is in general NP-hard, however in specific cases it is possible to calculate the solution which can be used in many engineering applications.
is in general NP-hard, however in specific cases it is possible to calculate the solution which can be used in many engineering applications.
The results of the calculations are the interval displacements 
Let's assume that the displacements in the column have to be smaller than some given value (due to safety). 
The uncertain system is safe if the interval solution satisfy all safety conditions.
In this particular case  or simple
or simple 
In postprocessing it is possible to calculate the interval stress, the interval strain and the interval limit state functions and use these values in the design process.
The interval finite element method can be applied to the solution of problems in which there is not enough information to create reliable probabilistic characteristic of the structures (Elishakoff 2000). Interval finite element method can be also applied in the theory of imprecise probability.