
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.

Dynamic positioning (DP) is a computer-controlled system to automatically maintain a vessel's position and heading by using its own propellers and thrusters. Position reference sensors, combined with wind sensors, motion sensors and gyrocompasses, provide information to the computer pertaining to the vessel's position and the magnitude and direction of environmental forces affecting its position. Examples of vessel types that employ DP include ships and semi-submersible mobile offshore drilling units (MODU), oceanographic research vessels, cable layer ships and cruise ships.

A remotely operated underwater vehicle (ROUV) or remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform underwater observation, inspection and physical tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry, military, scientific and other applications. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement. They are often used to visit wrecks at great depths beyond the capacities of submersibles for research purposes, such as the Titanic, amongst others.
Acoustic homing is the process in which a system uses the sound or acoustic signals of a target or destination to guide a moving object. There are two types of acoustic homing: passive acoustic homing and active acoustic homing. Objects using passive acoustic homing rely on detecting acoustic emissions produced by the target. Conversely, objects using active acoustic homing make use of sonar to emit a signal and detect its reflection off the target. The signal detected is then processed by the system to determine the proper response for the object. Acoustic homing is useful for applications where other forms of navigation and tracking can be ineffective. It is commonly used in environments where radio or GPS signals can not be detected, such as underwater.

USNS Mizar (MA-48/T-AGOR-11/T-AK-272) was a vessel of the United States Navy. She was named after the star Mizar.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.
A towed array sonar is a system of hydrophones towed behind a submarine or a surface ship on a cable. Trailing the hydrophones behind the vessel, on a cable that can be kilometers long, keeps the array's sensors away from the ship's own noise sources, greatly improving its signal-to-noise ratio, and hence the effectiveness of detecting and tracking faint contacts, such as quiet, low noise-emitting submarine threats, or seismic signals.

Marine salvage is the process of recovering a ship and its cargo after a shipwreck or other maritime casualty. Salvage may encompass towing, lifting a vessel, or effecting repairs to a ship. Salvors are normally paid for their efforts. However, protecting the coastal environment from oil spillages or other contaminants from a modern ship can also be a motivator, as oil, cargo, and other pollutants can easily leak from a wreck and in these instances, governments or authorities may organise the salvage.

Dr. Fred Noel Spiess was a naval officer, oceanographer and marine explorer. His work created new advances in marine technology including the FLIP Floating Instrument Platform, the Deep Tow vehicle for study of the seafloor, and the use of acoustics for underwater navigation and geodetic positioning.
USBL is a method of underwater acoustic positioning. A USBL system consists of a transceiver, which is mounted on a pole under a ship, and a transponder or responder on the seafloor, on a towfish, or on an ROV. A computer, or "topside unit", is used to calculate a position from the ranges and bearings measured by the transceiver.
Intervention AUV or I-AUV is a type of autonomous underwater vehicle. Its characteristic feature is that it is capable of autonomous interventions on the subsea installations, a task usually carried out by remotely operated underwater vehicles (ROVs) or human divers.

Submarine navigation underwater requires special skills and technologies not needed by surface ships. The challenges of underwater navigation have become more important as submarines spend more time underwater, travelling greater distances and at higher speed. Military submarines travel underwater in an environment of total darkness with neither windows nor lights. Operating in stealth mode, they cannot use their active sonar systems to ping ahead for underwater hazards such as undersea mountains, drilling rigs or other submarines. Surfacing to obtain navigational fixes is precluded by pervasive anti-submarine warfare detection systems such as radar and satellite surveillance. Antenna masts and antenna-equipped periscopes can be raised to obtain navigational signals but in areas of heavy surveillance, only for a few seconds or minutes; current radar technology can detect even a slender periscope while submarine shadows may be plainly visible from the air.
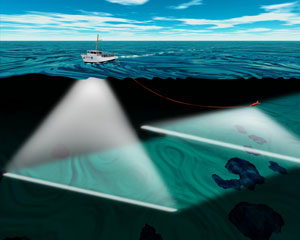
An underwater acoustic positioning system is a system for the tracking and navigation of underwater vehicles or divers by means of acoustic distance and/or direction measurements, and subsequent position triangulation. Underwater acoustic positioning systems are commonly used in a wide variety of underwater work, including oil and gas exploration, ocean sciences, salvage operations, marine archaeology, law enforcement and military activities.

A short baseline (SBL) acoustic positioning system is one of three broad classes of underwater acoustic positioning systems that are used to track underwater vehicles and divers. The other two classes are ultra short baseline systems (USBL) and long baseline systems (LBL). Like USBL systems, SBL systems do not require any seafloor mounted transponders or equipment and are thus suitable for tracking underwater targets from boats or ships that are either anchored or under way. However, unlike USBL systems, which offer a fixed accuracy, SBL positioning accuracy improves with transducer spacing. Thus, where space permits, such as when operating from larger vessels or a dock, the SBL system can achieve a precision and position robustness that is similar to that of sea floor mounted LBL systems, making the system suitable for high-accuracy survey work. When operating from a smaller vessel where transducer spacing is limited, the SBL system will exhibit reduced precision.
GPS sonobuoy or GPS intelligent buoy (GIB) are a type of inverted long-baseline (LBL) acoustic positioning devices where the transducers are installed on GPS-equipped sonobuoys that are either drifting or moored. GIBs may be used in conjunction with an active underwater device, or with a passive acoustic sound source. Typically the sound source or impact event is tracked or localized using a time of arrival (TOA) technique. Typically several GIBs are deployed over a given area of operation; with the total number determined by the size of the test area and the accuracy of the results desired. Different methods of GPS positioning may be used for positioning the array of GIBs, with accuracies of cm to meter level in realtime possible.

The Sentry is an autonomous underwater vehicle (AUV) made by the Woods Hole Oceanographic Institution. Sentry is designed to descend to depths of 6,000 metres (20,000 ft) and to carry a range of devices for taking samples, pictures and readings from the deep sea.
Underwater searches are procedures to find a known or suspected target object or objects in a specified search area under water. They may be carried out underwater by divers, manned submersibles, remotely operated underwater vehicles, or autonomous underwater vehicles, or from the surface by other agents, including surface vessels, aircraft and cadaver dogs.

Theseus is a large autonomous underwater vehicle (AUV) designed for laying fibre-optic cable on the seafloor.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.



