
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.
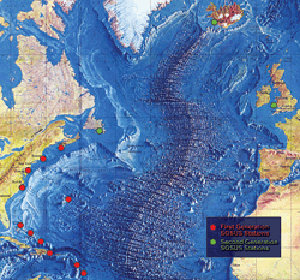
Sound Surveillance System (SOSUS) was the original name for a submarine detection system based on passive sonar developed by the United States Navy to track Soviet submarines. The system's true nature was classified with the name and acronym SOSUS classified as well. The unclassified name Project Caesar was used to cover the installation of the system and a cover story developed regarding the shore stations, identified only as a Naval Facility (NAVFAC), being for oceanographic research. The name changed to Integrated Undersea Surveillance System (IUSS) in 1985, as the fixed bottom arrays were supplemented by the mobile Surveillance Towed Array Sensor System (SURTASS) and other new systems. The commands and personnel were covered by the "oceanographic" term until 1991 when the mission was declassified. As a result, the commands, Oceanographic System Atlantic and Oceanographic System Pacific became Undersea Surveillance Atlantic and Undersea Surveillance Pacific, and personnel were able to wear insignia reflecting the mission.
Communication with submarines is a field within military communications that presents technical challenges and requires specialized technology. Because radio waves do not travel well through good electrical conductors like salt water, submerged submarines are cut off from radio communication with their command authorities at ordinary radio frequencies. Submarines can surface and raise an antenna above the sea level, or float a tethered buoy carrying an antenna, then use ordinary radio transmissions; however, this makes them vulnerable to detection by anti-submarine warfare forces.
Acoustic homing is the process in which a system uses the sound or acoustic signals of a target or destination to guide a moving object. There are two types of acoustic homing: passive acoustic homing and active acoustic homing. Objects using passive acoustic homing rely on detecting acoustic emissions produced by the target. Conversely, objects using active acoustic homing make use of sonar to emit a signal and detect its reflection off the target. The signal detected is then processed by the system to determine the proper response for the object. Acoustic homing is useful for applications where other forms of navigation and tracking can be ineffective. It is commonly used in environments where radio or GPS signals can not be detected, such as underwater.

An acoustic torpedo is a torpedo that aims itself by listening for characteristic sounds of its target or by searching for it using sonar. Acoustic torpedoes are usually designed for medium-range use, and often fired from a submarine.
A towed array sonar is a system of hydrophones towed behind a submarine or a surface ship on a cable. Trailing the hydrophones behind the vessel, on a cable that can be kilometers long, keeps the array's sensors away from the ship's own noise sources, greatly improving its signal-to-noise ratio, and hence the effectiveness of detecting and tracking faint contacts, such as quiet, low noise-emitting submarine threats, or seismic signals.

Anti-submarine warfare is a branch of underwater warfare that uses surface warships, aircraft, submarines, or other platforms, to find, track, and deter, damage, or destroy enemy submarines. Such operations are typically carried out to protect friendly shipping and coastal facilities from submarine attacks and to overcome blockades.

Acoustic location is a method of determining the position of an object or sound source by using sound waves. Location can take place in gases, liquids, and in solids.

The AN/UQQ-2 Surveillance Towed Array Sensor System (SURTASS), colloquially referred to as the ship's "Tail", is a towed array sonar system of the United States Navy.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.
Bistatic sonar is a sonar configuration in which transmitter and receiver are separated by a distance large enough to be comparable to the distance to the target. Most sonar systems are monostatic, in that the transmitter and receiver are located in the same place. A configuration with multiple receivers is called multistatic.

The SACLANT ASW Research Centre was the predecessor to the NATO Undersea Research Centre. It was known as The SACLANT ASW Research Centre from 1959 through 1986, and the SACLANT Undersea Research Centre from 1987 through 2003. The centre was commonly referred to as SACLANTCEN.
GPS sonobuoy or GPS intelligent buoy (GIB) are a type of inverted long-baseline (LBL) acoustic positioning devices where the transducers are installed on GPS-equipped sonobuoys that are either drifting or moored. GIBs may be used in conjunction with an active underwater device, or with a passive acoustic sound source. Typically the sound source or impact event is tracked or localized using a time of arrival (TOA) technique. Typically several GIBs are deployed over a given area of operation; with the total number determined by the size of the test area and the accuracy of the results desired. Different methods of GPS positioning may be used for positioning the array of GIBs, with accuracies of cm to meter level in realtime possible.
Underwater searches are procedures to find a known or suspected target object or objects in a specified search area under water. They may be carried out underwater by divers, manned submersibles, remotely operated underwater vehicles, or autonomous underwater vehicles, or from the surface by other agents, including surface vessels, aircraft and cadaver dogs.

The AN/AQS-13 series was a helicopter dipping sonar system for the United States Navy. These systems were deployed as the primary inner zone anti-submarine warfare (ASW) sensor on aircraft carrier based helicopters for over five decades. Companion versions with the AQS-18 designation were exported to various nations around the globe.

Captain Nicholas Hunter Heck was a career officer of the United States Coast and Geodetic Survey Corps. A leading geophysicist of his time, Heck made important contributions in the study of seismology and oceanography. He also revolutionized hydrographic surveying by developing the wire-drag surveying technique and introduced radio acoustic ranging into Coast and Geodetic Survey hydrography.
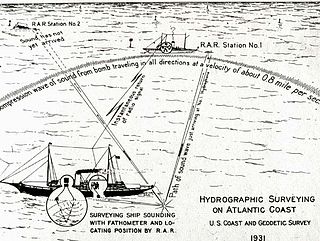
Radio acoustic ranging, occasionally written as "radio-acoustic ranging" and sometimes abbreviated RAR, was a method for determining a ship's precise location at sea by detonating an explosive charge underwater near the ship, detecting the arrival of the underwater sound waves at remote locations, and radioing the time of arrival of the sound waves at the remote stations to the ship, allowing the ship's crew to use true range multilateration to determine the ship's position. Developed by the United States Coast and Geodetic Survey in 1923 and 1924 for use in accurately fixing the position of survey ships during hydrographic survey operations, it was the first navigation technique in human history other than dead reckoning that did not require visual observation of a landmark, marker, light, or celestial body, and the first non-visual means to provide precise positions. First employed operationally in 1924, radio acoustic ranging remained in use until 1944, when new radio navigation techniques developed during World War II rendered it obsolete.
Low Frequency Analyzer and Recorder and Low Frequency Analysis and Recording (LOFAR) are the equipment and process respectively for presenting a visual spectrum representation of low frequency sounds in a time–frequency analysis. The process was originally applied to fixed surveillance passive antisubmarine sonar systems and later to sonobuoy and other systems. Originally the analysis was electromechanical and the display was produced on electrostatic recording paper, a Lofargram, with stronger frequencies presented as lines against background noise. The analysis migrated to digital and both analysis and display were digital after a major system consolidation into centralized processing centers during the 1990s.
The Missile Impact Location System or Missile Impact Locating System (MILS) is an ocean acoustic system designed to locate the impact position of test missile nose cones at the ocean's surface and then the position of the cone itself for recovery from the ocean bottom. The systems were installed in the missile test ranges managed by the U.S. Air Force.




