
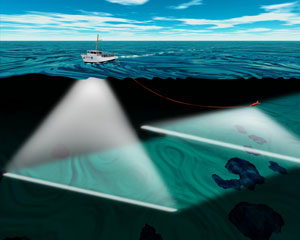
Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore oil exploration and drilling and related activities. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.

A remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement.

The Canadian Hydrographic Service (CHS) is part of the federal department of Fisheries and Oceans Canada and is Canada's authoritative hydrographic office. The CHS represents Canada in the International Hydrographic Organization (IHO).
Bathymetry is the study of underwater depth of ocean floors, lake floors, or river floors. In other words, bathymetry is the underwater equivalent to hypsometry or topography. The first recorded evidence of water depth measurements are from Ancient Egypt over 3000 years ago. Bathymetric charts, are typically produced to support safety of surface or sub-surface navigation, and usually show seafloor relief or terrain as contour lines and selected depths (soundings), and typically also provide surface navigational information. Bathymetric maps may also use a Digital Terrain Model and artificial illumination techniques to illustrate the depths being portrayed. The global bathymetry is sometimes combined with topography data to yield a global relief model. Paleobathymetry is the study of past underwater depths.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.

Marine engineering is the engineering of boats, ships, submarines, and any other marine vessel. Here it is also taken to include the engineering of other ocean systems and structures – referred to in certain academic and professional circles as “ocean engineering.”

Unmanned underwater vehicles (UUV), sometimes known as underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.
An unmanned surface vehicle, unmanned surface vessel or uncrewed surface vessel (USV), colloqually called a drone boat, drone ship or sea drone, is a boat or ship that operates on the surface of the water without a crew. USVs operate with various levels of autonomy, from remote control to fully autonomous surface vehicles (ASV).

Kongsberg Maritime (KM) is a Norwegian technology enterprise within the Kongsberg Gruppen (KOG). Kongsberg Maritime deliver systems for positioning, surveying, navigation, and automation to merchant vessels and offshore installations. Their most well known products exist within dynamic positioning systems, marine automation and surveillance systems, process automation, satellite navigation, and hydroacoustics.

An uncrewed vehicle or unmanned vehicle is a vehicle without a person on board. Uncrewed vehicles can either be under telerobotic control—remote controlled or remote guided vehicles—or they can be autonomously controlled—autonomous vehicles—which are capable of sensing their environment and navigating on their own.
Explorer autonomous underwater vehicle (AUV) is a Chinese AUV developed in the People's Republic of China (PRC),first entering service in November 1994. It should not be confused with another two Anglo-American AUVs that share the same name: the American Autonomous Benthic Explorer AUV (ABE) built by Woods Hole Oceanographic Institution, and the British Columbia-based International Submarine Engineeringbuilt Canadian Explorer AUV, which is based on its earlier ARCS AUV.Many Chinese AUVs later developed, such as Wukong, WZODA, CR series, Exploration series, Micro Dragon series, Sea Whale series, Submerged Dragon series AUVs, are all based on experienced gained from Explorer AUV.

The ASW Continuous Trail Unmanned Vessel (ACTUV) is a DARPA funded project launched in early 2010 to develop an anti-submarine drone. ASW is an acronym for Anti-Submarine Warfare. In January 2018 after successful sea trials it was announced that the "Sea Hunter" prototype has transitioned from DARPA to the Office of Naval Research for further development.

The Fleet-class unmanned surface vessel, also called the Common Unmanned Surface Vessel (CUSV) and later the Mine Countermeasures Unmanned Surface Vehicle, is an unmanned surface vessel designed for the United States Navy to be deployed from Freedom and Independence-class littoral combat ships and intended to conduct mine and anti-submarine warfare missions. As of 2012 four units of the class have been built; the first was delivered to the U.S. Navy in 2008.

INS Investigator (J15) is the fourth ship in the Sandhayak class, and operates as a hydrographic survey ship in the Indian Navy's Southern Naval Command. Investigator is equipped to prepare marine charts and electronic maps for the Electronic Chart Display and Information System (ECDIS). It can provide humanitarian aid and disaster-management support, and can be quickly converted into a hospital ship; the ship is equipped with an operating theater and associated equipment to deal with medical emergencies at sea.
Underwater work is work done underwater, generally by divers during diving operations, but includes work done underwater by remotely operated vehicles and crewed submersibles.
USV Maxlimer is a semi-autonomous, remotely controlled unmanned surface vehicle (USV) owned and operated by the British company SEA-KIT International. She was the winning entry in the Shell Ocean Discovery X Prize competition, and subsequently has been used as a proof-of-concept vessel for uncrewed, over-the-horizon offshore operations.
The JARI USV is an uncrewed surface vehicle developed by the China Shipbuilding Industry Corporation (CSIC), specifically between its No. 716 Research Institute, the Jiangsu Automation Research Institute (JARI), and No. 702 Research Institute, China Ship Scientific Research Centre (CSRRC). The uncrewed warship is designed for potential use for the People's Liberation Army Navy and export customers.
Saildrone, Inc. is a United States company based in Alameda, California, that designs, manufacturers, and operates a fleet of unmanned/uncrewed surface vehicles (USVs), or ocean drones, known as "saildrones". The company was founded by engineer Richard Jenkins in 2012.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.



