
Charcot–Marie–Tooth disease (CMT) is a hereditary motor and sensory neuropathy of the peripheral nervous system characterized by progressive loss of muscle tissue and touch sensation across various parts of the body. This disease is the most commonly inherited neurological disorder, affecting about one in 2,500 people. It is named after those who classically described it: the Frenchman Jean-Martin Charcot (1825–1893), his pupil Pierre Marie (1853–1940), and the Briton Howard Henry Tooth (1856–1925).
Spasticity is a feature of altered skeletal muscle performance with a combination of paralysis, increased tendon reflex activity, and hypertonia. It is also colloquially referred to as an unusual "tightness", stiffness, or "pull" of muscles.
In biology, a reflex, or reflex action, is an involuntary, unplanned sequence or action and nearly instantaneous response to a stimulus.
A motor unit is made up of a motor neuron and all of the skeletal muscle fibers innervated by the neuron's axon terminals, including the neuromuscular junctions between the neuron and the fibres. Groups of motor units often work together as a motor pool to coordinate the contractions of a single muscle. The concept was proposed by Charles Scott Sherrington.
Muscle fatigue is the decline in ability of muscles to generate force. It can be a result of vigorous exercise but abnormal fatigue may be caused by barriers to or interference with the different stages of muscle contraction. There are two main causes of muscle fatigue: the limitations of a nerve’s ability to generate a sustained signal ; and the reduced ability of the muscle fiber to contract.

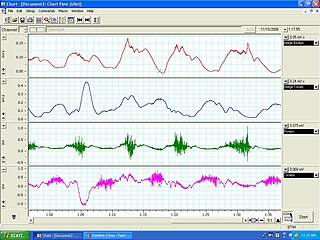
Electromyography (EMG) is a technique for evaluating and recording the electrical activity produced by skeletal muscles. EMG is performed using an instrument called an electromyograph to produce a record called an electromyogram. An electromyograph detects the electric potential generated by muscle cells when these cells are electrically or neurologically activated. The signals can be analyzed to detect abnormalities, activation level, or recruitment order, or to analyze the biomechanics of human or animal movement. Needle EMG is an electrodiagnostic medicine technique commonly used by neurologists. Surface EMG is a non-medical procedure used to assess muscle activation by several professionals, including physiotherapists, kinesiologists and biomedical engineers. In Computer Science, EMG is also used as middleware in gesture recognition towards allowing the input of physical action to a computer as a form of human-computer interaction.
Motor control is the regulation of movement in organisms that possess a nervous system. Motor control includes reflexes as well as directed movement.
Motor coordination is the orchestrated movement of multiple body parts as required to accomplish intended actions, like walking. This coordination is achieved by adjusting kinematic and kinetic parameters associated with each body part involved in the intended movement. The modifications of these parameters typically relies on sensory feedback from one or more sensory modalities, such as proprioception and vision.
Muscle coactivation occurs when agonist and antagonist muscles surrounding a joint contract simultaneously to provide joint stability. It is also known as muscle cocontraction, since two muscle groups are contracting at the same time. It is able to be measured using electromyography (EMG) from the contractions that occur. The general mechanism of it is still widely unknown. It is believed to be important in joint stabilization, as well as general motor control.

Standing, also referred to as orthostasis, is a position in which the body is held in an erect ("orthostatic") position and supported only by the feet. Although seemingly static, the body rocks slightly back and forth from the ankle in the sagittal plane. The sagittal plane bisects the body into right and left sides. The sway of quiet standing is often likened to the motion of an inverted pendulum.

Orthotics is a medical specialty that focuses on the design and application of orthoses, or braces. An orthosis is "an externally applied device used to influence the structural and functional characteristics of the neuromuscular and skeletal system".

Locomotor effects of shoes are the way in which the physical characteristics or components of shoes influence the locomotion neuromechanics of a person. Depending on the characteristics of the shoes, the effects are various, ranging from alteration in balance and posture, muscle activity of different muscles as measured by electromyography (EMG), and the impact force. There are many different types of shoes that exist, such as running, walking, loafers, high heels, sandals, slippers, work boots, dress shoes, and many more. However, a typical shoe will be composed of an insole, midsole, outsole, and heels, if any. In an unshod condition, where one is without any shoes, the locomotor effects are primarily observed in the heel strike patterns and resulting impact forces generated on the ground.

Spinal locomotion results from intricate dynamic interactions between a central program in lower thoracolumbar spine and proprioceptive feedback from body in the absence of central control by brain as in complete spinal cord injury (SCI). Following SCI, the spinal circuitry below the lesion site does not become silent rather it continues to maintain active and functional neuronal properties although in a modified manner.
Normal aging movement control in humans is about the changes in the muscles, motor neurons, nerves, sensory functions, gait, fatigue, visual and manual responses, in men and women as they get older but who do not have neurological, muscular or neuromuscular disorder. With aging, neuromuscular movements are impaired, though with training or practice, some aspects may be prevented.
In neuroscience and motor control, the degrees of freedom problem or motor equivalence problem states that there are multiple ways for humans or animals to perform a movement in order to achieve the same goal. In other words, under normal circumstances, no simple one-to-one correspondence exists between a motor problem and a motor solution to the problem. The motor equivalence problem was first formulated by the Russian neurophysiologist Nikolai Bernstein: "It is clear that the basic difficulties for co-ordination consist precisely in the extreme abundance of degrees of freedom, with which the [nervous] centre is not at first in a position to deal."
Clinical Electrophysiological Testing is based on techniques derived from electrophysiology used for the clinical diagnosis of patients. There are many processes that occur in the body which produce electrical signals that can be detected. Depending on the location and the source of these signals, distinct methods and techniques have been developed to properly target them.
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
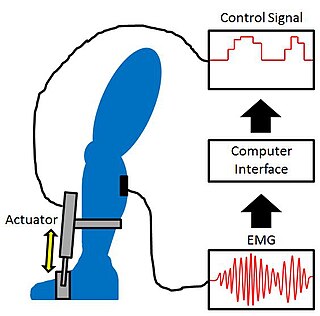
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.

Cutaneous, superficial, or skin reflexes, are activated by skin receptors and play a valuable role in locomotion, providing quick responses to unexpected environmental challenges. They have been shown to be important in responses to obstacles or stumbling, in preparing for visually challenging terrain, and for assistance in making adjustments when instability is introduced. In addition to the role in normal locomotion, cutaneous reflexes are being studied for their potential in enhancing rehabilitation therapy (physiotherapy) for people with gait abnormalities.
Interlimb coordination is the coordination of the left and right limbs. It could be classified into two types of action: bimanual coordination and hands or feet coordination. Such coordination involves various parts of the nervous system and requires a sensory feedback mechanism for the neural control of the limbs. A model can be used to visualize the basic features, the control centre of locomotor movements, and the neural control of interlimb coordination. This coordination mechanism can be altered and adapted for better performance during locomotion in adults and for the development of motor skills in infants. The adaptive feature of interlimb coordination can also be applied to the treatment for CNS damage from stroke and the Parkinson's disease in the future.




