Bio-mechatronics mimics how the human body works. For example, four different steps must occur to lift the foot to walk. First, impulses from the brain's motor center are sent to the foot and leg muscles. Next, the nerve cells in the feet send information, providing feedback to the brain, enabling it to adjust the muscle groups or amount of force required to walk across the ground. Different amounts of energy are applied depending on the type of surface being walked across. The leg's muscle spindlenerve cells then sense and send the position of the floor back up to the brain. Finally, when the foot is raised to step, signals are sent to muscles in the leg and foot to set it down.
Biosensors
Biosensors detect what the user wants to do or their intentions and motions. In some devices, the information can is relayed by the user's nervous or muscle system. This information is related by the biosensor to a controller, which can be located inside or outside the biomechatronic device. In addition biosensors receive information about the limb position and force from the limb and actuator. Biosensors come in a variety of forms. They can be wires which detect electrical activity, needle electrodes implanted in muscles, and electrode arrays with nerves growing through them.
Electromechanical sensors
The purpose of the mechanical sensors is to measure information about the biomechatronic device and relate that information to the biosensor or controller. Additionally, many sensors are being used at schools, such as Case Western Reserve University, the University of Pittsburgh, Johns Hopkins University, among others, with the goal of recording physical stimuli and converting them to neural signals for a subarea of bio-mechatronics called neuro-mechatronics.
Controller
The controller in a biomechatronic device relays the user's intentions to the actuators. It also interprets feedback information to the user that comes from the biosensors and mechanical sensors. The other function of the controller is to control the biomechatronic device's movements.
Actuator
The actuator can be an artificial muscle but it can be any part of the system which provides an outward effect based on the control input. For a mechanical actuator, its job is to produce force and movement. Depending on whether the device is orthotic or prosthetic the actuator can be a motor that assists or replaces the user's original muscle. Many such systems actually involve multiple actuators.
Analyzing human motions, which are complex, to aid in the design of biomechatronic devices
Studying how electronic devices can be interfaced with the nervous system.
Testing the ways to use living muscle tissue as actuators for electronic devices
Analyzing motions
A great deal of analysis over human motion is needed because human movement is very complex. MIT and the University of Twente are both working to analyze these movements. They are doing this through a combination of computer models, camera systems, and electromyograms.
Neural Interfacing
Interfacing allows bio-mechatronics devices to connect with the muscle systems and nerves of the user in order send and receive information from the device. This is a technology that is not available in ordinary orthotics and prosthetics devices. Groups at the University of Twente and University of Malaya are making drastic steps in this department. Scientists there have developed a device which will help to treat paralysis and stroke victims who are unable to control their foot while walking. The researchers are also nearing a breakthrough which would allow a person with an amputated leg to control their prosthetic leg through their stump muscles.
Researchers at MIT have developed a tool called the MYO-AMI system which allows for proprioceptive feedback (position sensing) in the lower extremity (legs, transtibial). Still others focus on interfacing for the upper extremity (Functional Neural Interface Lab, CWRU). There are both CNS and PNS approaches further subdivided into brain, spinal cord, dorsal root ganglion, spinal/cranial nerve, and end effector techniques and some purely surgical techniques with no device component (see Targeted Muscle Reinnervation).
MIT research
Hugh Herr is the leading biomechatronic scientist at MIT. Herr and his group of researchers are developing a sieveintegrated circuitelectrode and prosthetic devices that are coming closer to mimicking real human movement. The two prosthetic devices currently in the making will control knee movement and the other will control the stiffness of an ankle joint.
Robotic fish
As mentioned before Herr and his colleagues made a robotic fish that was propelled by living muscle tissue taken from frog legs. The robotic fish was a prototype of a biomechatronic device with a living actuator. The following characteristics were given to the fish.[2]
A styrofoam float so the fish can float
Electrical wires for connections
A silicone tail that enables force while swimming
Power provided by lithium batteries
A microcontroller to control movement
An infrared sensor enables the microcontroller to communicate with a handheld device
Muscles stimulated by an electronic unit
Arts research
New media artists at UCSD are using bio-mechatronics in performance art pieces, such as Technesexual (more information, photos, video), a performance which uses biometric sensors to bridge the performers' real bodies to their Second Life avatars and Slapshock (more information, photos, video), in which medical TENS units are used to explore intersubjective symbiosis in intimate relationships.
Growth
The demand for biomechatronic devices are at an all-time high and show no signs of slowing down. With increasing technological advancement in recent years, biomechatronic researchers have been able to construct prosthetic limbs that are capable of replicating the functionality of human appendages. Such devices include the "i-limb", developed by prosthetic company Touch Bionics, the first fully functioning prosthetic hand with articulating joints,[3] as well as Herr's PowerFoot BiOM, the first prosthetic leg capable of simulating muscle and tendon processes within the human body.[4] Biomechatronic research has also helped further research towards understanding human functions. Researchers from Carnegie Mellon and North Carolina State have created an exoskeleton that decreases the metabolic cost of walking by around 7 percent.[5]
Despite the demand, however, biomechatronic technologies struggle within the healthcare market due to high costs and lack of implementation into insurance policies. Herr claims that Medicare and Medicaid specifically are important "market-breakers or market-makers for all these technologies," and that the technologies will not be available to everyone until the technologies get a breakthrough.[6] Biomechatronic devices, although improved, also still face mechanical obstructions, suffering from inadequate battery power, consistent mechanical reliability, and neural connections between prosthetics and the human body.[7]
In medicine, a prosthesis, or a prosthetic implant, is an artificial device that replaces a missing body part, which may be lost through physical trauma, disease, or a condition present at birth. Prostheses may restore the normal functions of the missing body part, or may perform a cosmetic function.
Cyberware is a relatively new and unknown field. In science fiction circles, however, it is commonly known to mean the hardware or machine parts implanted in the human body and acting as an interface between the central nervous system and the computers or machinery connected to it.
Biorobotics is an interdisciplinary science that combines the fields of biomedical engineering, cybernetics, and robotics to develop new technologies that integrate biology with mechanical systems to develop more efficient communication, alter genetic information, and create machines that imitate biological systems.
Brain implants, often referred to as neural implants, are technological devices that connect directly to a biological subject's brain – usually placed on the surface of the brain, or attached to the brain's cortex. A common purpose of modern brain implants and the focus of much current research is establishing a biomedical prosthesis circumventing areas in the brain that have become dysfunctional after a stroke or other head injuries. This includes sensory substitution, e.g., in vision. Other brain implants are used in animal experiments simply to record brain activity for scientific reasons. Some brain implants involve creating interfaces between neural systems and computer chips. This work is part of a wider research field called brain–computer interfaces.
Neuroprosthetics is a discipline related to neuroscience and biomedical engineering concerned with developing neural prostheses. They are sometimes contrasted with a brain–computer interface, which connects the brain to a computer rather than a device meant to replace missing biological functionality.
Bioelectronics is a field of research in the convergence of biology and electronics.
Össur hf. is a company based in Iceland that develops, manufactures and sells non-invasive equipment for orthopaedics, including bracing and support products, compression therapy, and prosthetics. The company is headquartered in Reykjavík, with offices in the Americas, Europe, and Asia, and distributors in other markets.
A cyborg is a being with both organic and biomechatronic body parts. The term was coined in 1960 by Manfred Clynes and Nathan S. Kline. In contrast to biorobots and androids, the term cyborg applies to a living organism that has restored function or enhanced abilities due to the integration of some artificial component or technology that relies on feedback.
Robotics is the interdisciplinary study and practice of the design, construction, operation, and use of robots.
Hugh Herr is an American rock climber, engineer, and biophysicist. When he was young, both of his legs were amputated below the knee during a blizzard in a rock climbing trip. After months of surgeries and rehabilitation, Herr began climbing again, using specialized prostheses he designed for himself, becoming the first person with a major amputation to perform in a sport on par with elite-level, able-bodied persons. He holds the patents to the Rheo Knee, an active ankle-foot orthosis, which is the world's first powered ankle-foot prosthesis.
The following outline is provided as an overview of and topical guide to robotics:
Orthotics is a medical specialty that focuses on the design and application of orthoses, sometimes known as braces, calipers, or splints. An orthosis is "an externally applied device used to influence the structural and functional characteristics of the neuromuscular and skeletal systems." Orthotists are medical professionals who specialize in designing orthotic devices such as braces or foot orthoses.
A powered exoskeleton is a mobile machine wearable over all or part of the human body, providing ergonomic structural support, and powered by a system of electric motors, pneumatics, levers, hydraulics or a combination of cybernetic technologies, allowing for sufficient limb movement, and providing increased strength, protection and endurance.
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
AnimatLab is an open-source neuromechanical simulation tool that allows authors to easily build and test biomechanical models and the neural networks that control them to produce behaviors. Users can construct neural models of varied level of details, 3D mechanical models of triangle meshes, and use muscles, motors, receptive fields, stretch sensors and other transducers to interface the two systems. Experiments can be run in which various stimuli are applied and data is recorded, making it a useful tool for computational neuroscience. The software can also be used to model biomimetic robotic systems.
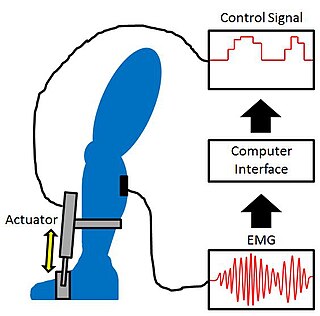
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
A robot leg is a mechanical leg that performs the same functions that a human leg can. The robotic leg is typically programmed to execute similar functions as a human leg. A robotic leg is similar to a prosthetic leg. However, a robotic leg can be controlled electrically or mechanically. To have the robotic leg emulate human leg behaviors, surgeons must redirect the nerves that previously controlled some of the person’s lower-leg muscles to cause the thigh muscles to contract. Sensors embedded in the robotic leg measure the electrical pulses created by both a re-innervated muscle contraction, and the existing thigh muscle.
Robotic prosthesis control is a method for controlling a prosthesis in such a way that the controlled robotic prosthesis restores a biologically accurate gait to a person with a loss of limb. This is a special branch of control that has an emphasis on the interaction between humans and robotics.
A soft exoskeleton, also known as a soft wearable robot or a soft robotic exosuit, is a type of wearable robotic device designed to augment and enhance the physical abilities of the human body. Unlike traditional rigid exoskeletons, which are typically made of hard materials like metal and are worn over the user's limbs, soft exoskeletons are constructed from flexible and lightweight materials. Soft exoskeletons are designed to assist individuals with mobility impairments, aid in rehabilitation, augment human performance, and improve overall quality of life.
Elliott J Rouse is an American mechanical engineer, roboticist, and academic. He is an associate professor in the Departments of Robotics and Mechanical Engineering and Director of the Neurobionics Lab at the University of Michigan.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.