In computer science, an array is a data structure consisting of a collection of elements, of same memory size, each identified by at least one array index or key. An array is stored such that the position of each element can be computed from its index tuple by a mathematical formula. The simplest type of data structure is a linear array, also called one-dimensional array.

In computer science, a data structure is a data organization, management, and storage format that is usually chosen for efficient access to data. More precisely, a data structure is a collection of data values, the relationships among them, and the functions or operations that can be applied to the data, i.e., it is an algebraic structure about data.
In computer science, a double-ended queue is an abstract data type that generalizes a queue, for which elements can be added to or removed from either the front (head) or back (tail). It is also often called a head-tail linked list, though properly this refers to a specific data structure implementation of a deque.
In computing, a hash table, also known as hash map, is a data structure that implements an associative array or dictionary. It is an abstract data type that maps keys to values. A hash table uses a hash function to compute an index, also called a hash code, into an array of buckets or slots, from which the desired value can be found. During lookup, the key is hashed and the resulting hash indicates where the corresponding value is stored.
In computer science, a linked list is a linear collection of data elements whose order is not given by their physical placement in memory. Instead, each element points to the next. It is a data structure consisting of a collection of nodes which together represent a sequence. In its most basic form, each node contains data, and a reference to the next node in the sequence. This structure allows for efficient insertion or removal of elements from any position in the sequence during iteration. More complex variants add additional links, allowing more efficient insertion or removal of nodes at arbitrary positions. A drawback of linked lists is that data access time is a linear function of the number of nodes for each linked list because nodes are serially linked so a node needs to be accessed first to access the next node. Faster access, such as random access, is not feasible. Arrays have better cache locality compared to linked lists.
In computer science, amortized analysis is a method for analyzing a given algorithm's complexity, or how much of a resource, especially time or memory, it takes to execute. The motivation for amortized analysis is that looking at the worst-case run time can be too pessimistic. Instead, amortized analysis averages the running times of operations in a sequence over that sequence. As a conclusion: "Amortized analysis is a useful tool that complements other techniques such as worst-case and average-case analysis."
In computer science, a fusion tree is a type of tree data structure that implements an associative array on w-bit integers on a finite universe, where each of the input integers has size less than 2w and is non-negative. When operating on a collection of n key–value pairs, it uses O(n) space and performs searches in O(logwn) time, which is asymptotically faster than a traditional self-balancing binary search tree, and also better than the van Emde Boas tree for large values of w. It achieves this speed by using certain constant-time operations that can be done on a machine word. Fusion trees were invented in 1990 by Michael Fredman and Dan Willard.

In computer science, a dynamic array, growable array, resizable array, dynamic table, mutable array, or array list is a random access, variable-size list data structure that allows elements to be added or removed. It is supplied with standard libraries in many modern mainstream programming languages. Dynamic arrays overcome a limit of static arrays, which have a fixed capacity that needs to be specified at allocation.
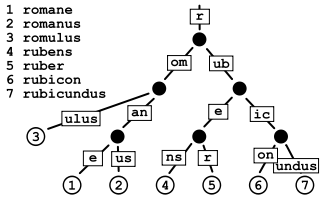
In computer science, a radix tree is a data structure that represents a space-optimized trie in which each node that is the only child is merged with its parent. The result is that the number of children of every internal node is at most the radix r of the radix tree, where r is a positive integer and a power x of 2, having x ≥ 1. Unlike regular trees, edges can be labeled with sequences of elements as well as single elements. This makes radix trees much more efficient for small sets and for sets of strings that share long prefixes.
In computing, a cache-oblivious algorithm is an algorithm designed to take advantage of a processor cache without having the size of the cache as an explicit parameter. An optimal cache-oblivious algorithm is a cache-oblivious algorithm that uses the cache optimally. Thus, a cache-oblivious algorithm is designed to perform well, without modification, on multiple machines with different cache sizes, or for a memory hierarchy with different levels of cache having different sizes. Cache-oblivious algorithms are contrasted with explicit loop tiling, which explicitly breaks a problem into blocks that are optimally sized for a given cache.
In computer science, an algorithm is said to be asymptotically optimal if, roughly speaking, for large inputs it performs at worst a constant factor worse than the best possible algorithm. It is a term commonly encountered in computer science research as a result of widespread use of big-O notation.
In computational complexity theory, the potential method is a method used to analyze the amortized time and space complexity of a data structure, a measure of its performance over sequences of operations that smooths out the cost of infrequent but expensive operations.
In computer science, a succinct data structure is a data structure which uses an amount of space that is "close" to the information-theoretic lower bound, but still allows for efficient query operations. The concept was originally introduced by Jacobson to encode bit vectors, (unlabeled) trees, and planar graphs. Unlike general lossless data compression algorithms, succinct data structures retain the ability to use them in-place, without decompressing them first. A related notion is that of a compressed data structure, insofar as the size of the stored or encoded data similarly depends upon the specific content of the data itself.
A hash array mapped trie (HAMT) is an implementation of an associative array that combines the characteristics of a hash table and an array mapped trie. It is a refined version of the more general notion of a hash tree.
In computer science, dynamic perfect hashing is a programming technique for resolving collisions in a hash table data structure. While more memory-intensive than its hash table counterparts, this technique is useful for situations where fast queries, insertions, and deletions must be made on a large set of elements.
In computer science, array is a data type that represents a collection of elements, each selected by one or more indices that can be computed at run time during program execution. Such a collection is usually called an array variable or array value. By analogy with the mathematical concepts vector and matrix, array types with one and two indices are often called vector type and matrix type, respectively. More generally, a multidimensional array type can be called a tensor type, by analogy with the physical concept, tensor.
In computing, sequence containers refer to a group of container class templates in the standard library of the C++ programming language that implement storage of data elements. Being templates, they can be used to store arbitrary elements, such as integers or custom classes. One common property of all sequential containers is that the elements can be accessed sequentially. Like all other standard library components, they reside in namespace std.
F2FS is a flash file system initially developed by Samsung Electronics for the Linux kernel.
In computer science, the cell-probe model is a model of computation similar to the random-access machine, except that all operations are free except memory access. This model is useful for proving lower bounds of algorithms for data structure problems.
This is a comparison of the performance of notable data structures, as measured by the complexity of their logical operations. For a more comprehensive listing of data structures, see List of data structures.
