It is important to note the distinction between rotary reflection and rotary inversion symmetry operations and their associated symmetry elements. Rotary reflections are generally used to describe the symmetry of individual molecules and are defined as a 360°/n rotation about an n-fold rotation axis followed by a reflection over a mirror plane perpendicular to the n-fold rotation axis. Rotoinversions are generally used to describe the symmetry of crystals and are defined as a 360°/n rotation about an n-fold rotation axis followed by an inversion through the origin. Although rotary reflection operations have a rotoinversion analogue and vice versa, rotoreflections and rotoinversions of the same order need not be identical. For example, a 6-fold rotoinversion axis and its associated with symmetry operations are distinct from those resulting from a 6-fold reflection axis.
In 3 dimensions, improper rotation is equivalently defined as a combination of rotation about an axis and inversion in a point on the axis.[1] For this reason it is also called a rotoinversion or rotary inversion. The two definitions are equivalent because rotation by an angle θ followed by reflection is the same transformation as rotation by θ+180° followed by inversion (taking the point of inversion to be in the plane of reflection). In both definitions, the operations commute.
A three-dimensional symmetry that has only one fixed point is necessarily an improper rotation.[3]
An improper rotation of an object thus produces a rotation of its mirror image. The axis is called the rotation-reflection axis.[6] This is called an n-fold improper rotation if the angle of rotation, before or after reflexion, is 360°/n (where n must be even).[6] There are several different systems for naming individual improper rotations:
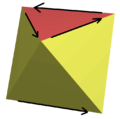
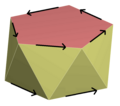
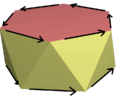
In the Schoenflies notation the symbol Sn (German, Spiegel, for mirror), where n must be even, denotes the symmetry group generated by an n-fold improper rotation. For example, the symmetry operation S6 is the combination of a rotation of (360°/6)=60° and a mirror plane reflection. (This should not be confused with the same notation for symmetric groups).[6]
In Hermann–Mauguin notation the symbol n is used for an n-fold rotoinversion; i.e., rotation by an angle of rotation of 360°/n with inversion. If n is even it must be divisible by 4. (Note that 2 would be simply a reflection, and is normally denoted "m", for "mirror".) When n is odd this corresponds to a 2n-fold improper rotation (or rotary reflexion).
The Coxeter notation for S2n is [2n+,2+] and , as an index 4 subgroup of [2n,2], , generated as the product of 3 reflections.
The direct subgroup of S2n is Cn, order n, index 2, being the rotoreflection generator applied twice.
For odd n, S2n contains an inversion, denoted Ci or S2. S2n is the direct product: S2n = Cn×S2, if n is odd.
For any n, if odd p is a divisor of n, then S2n/p is a subgroup of S2n, index p. For example S4 is a subgroup of S12, index 3.
As an indirect isometry
In a wider sense, an improper rotation may be defined as any indirect isometry; i.e., an element of E(3)\E+(3): thus it can also be a pure reflection in a plane, or have a glide plane. An indirect isometry is an affine transformation with an orthogonal matrix that has a determinant of −1.
A proper rotation is an ordinary rotation. In the wider sense, a proper rotation is defined as a direct isometry; i.e., an element of E+(3): it can also be the identity, a rotation with a translation along the axis, or a pure translation. A direct isometry is an affine transformation with an orthogonal matrix that has a determinant of 1.
In either the narrower or the wider senses, the composition of two improper rotations is a proper rotation, and the composition of an improper and a proper rotation is an improper rotation.
Physical systems
When studying the symmetry of a physical system under an improper rotation (e.g., if a system has a mirror symmetry plane), it is important to distinguish between vectors and pseudovectors (as well as scalars and pseudoscalars, and in general between tensors and pseudotensors), since the latter transform differently under proper and improper rotations (in 3 dimensions, pseudovectors are invariant under inversion).
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.