| Trigonometry |
|---|
 |
| Reference |
| Laws and theorems |
| Calculus |
| Mathematicians |
In trigonometry, tangent half-angle formulas relate the tangent of half of an angle to trigonometric functions of the entire angle. [1]
| Trigonometry |
|---|
| |
| Reference |
| Laws and theorems |
| Calculus |
| Mathematicians |
In trigonometry, tangent half-angle formulas relate the tangent of half of an angle to trigonometric functions of the entire angle. [1]
The tangent of half an angle is the stereographic projection of the circle through the point at angle radians onto the line through the angles . Tangent half-angle formulae include with simpler formulae when η is known to be 0, π/2, π, or 3π/2 because sin(η) and cos(η) can be replaced by simple constants.
In the reverse direction, the formulae include
Using the angle addition and subtraction formulae for both the sine and cosine one obtains
Setting and and substituting yields
Dividing the sum of sines by the sum of cosines gives
Also, a similar calculation starting with and gives
Furthermore, using double-angle formulae and the Pythagorean identity gives Taking the quotient of the formulae for sine and cosine yields

Applying the formulae derived above to the rhombus figure on the right, it is readily shown that
In the unit circle, application of the above shows that . By similarity of triangles,
It follows that

In various applications of trigonometry, it is useful to rewrite the trigonometric functions (such as sine and cosine) in terms of rational functions of a new variable . These identities are known collectively as the tangent half-angle formulae because of the definition of . These identities can be useful in calculus for converting rational functions in sine and cosine to functions of t in order to find their antiderivatives.
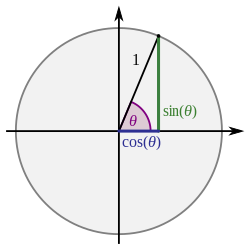
Geometrically, the construction goes like this: for any point (cos φ, sin φ) on the unit circle, draw the line passing through it and the point (−1, 0). This point crosses the y-axis at some point y = t. One can show using simple geometry that t = tan(φ/2). The equation for the drawn line is y = (1 + x)t. The equation for the intersection of the line and circle is then a quadratic equation involving t. The two solutions to this equation are (−1, 0) and (cos φ, sin φ). This allows us to write the latter as rational functions of t (solutions are given below).
The parameter t represents the stereographic projection of the point (cos φ, sin φ) onto the y-axis with the center of projection at (−1, 0). Thus, the tangent half-angle formulae give conversions between the stereographic coordinate t on the unit circle and the standard angular coordinate φ.
Then we have
and
Both this expression of and the expression can be solved for . Equating these gives the arctangent in terms of the natural logarithm
In calculus, the tangent half-angle substitution is used to find antiderivatives of rational functions of sin φ and cos φ. Differentiating gives and thus
One can play an entirely analogous game with the hyperbolic functions. A point on (the right branch of) a hyperbola is given by (cosh ψ, sinh ψ). Projecting this onto y-axis from the center (−1, 0) gives the following:
with the identities
and
Finding ψ in terms of t leads to following relationship between the inverse hyperbolic tangent and the natural logarithm:
The hyperbolic tangent half-angle substitution in calculus uses
Comparing the hyperbolic identities to the circular ones, one notices that they involve the same functions of t, just permuted. If we identify the parameter t in both cases we arrive at a relationship between the circular functions and the hyperbolic ones. That is, if
then
where gd(ψ) is the Gudermannian function. The Gudermannian function gives a direct relationship between the circular functions and the hyperbolic ones that does not involve complex numbers. The above descriptions of the tangent half-angle formulae (projection the unit circle and standard hyperbola onto the y-axis) give a geometric interpretation of this function.
Starting with a Pythagorean triangle with side lengths a, b, and c that are positive integers and satisfy a2 + b2 = c2, it follows immediately that each interior angle of the triangle has rational values for sine and cosine, because these are just ratios of side lengths. Thus each of these angles has a rational value for its half-angle tangent, using tan φ/2 = sin φ / (1 + cos φ).
The reverse is also true. If there are two positive angles that sum to 90°, each with a rational half-angle tangent, and the third angle is a right angle then a triangle with these interior angles can be scaled to a Pythagorean triangle. If the third angle is not required to be a right angle, but is the angle that makes the three positive angles sum to 180° then the third angle will necessarily have a rational number for its half-angle tangent when the first two do (using angle addition and subtraction formulas for tangents) and the triangle can be scaled to a Heronian triangle.
Generally, if K is a subfield of the complex numbers then tan φ/2 ∈ K ∪ {∞} implies that {sin φ, cos φ, tan φ, sec φ, csc φ, cot φ} ⊆ K ∪ {∞}.





































