Computer vision tasks include methods for acquiring, processing, analyzing and understanding digital images, and extraction of high-dimensional data from the real world in order to produce numerical or symbolic information, e.g. in the forms of decisions. Understanding in this context means the transformation of visual images into descriptions of world that make sense to thought processes and can elicit appropriate action. This image understanding can be seen as the disentangling of symbolic information from image data using models constructed with the aid of geometry, physics, statistics, and learning theory.
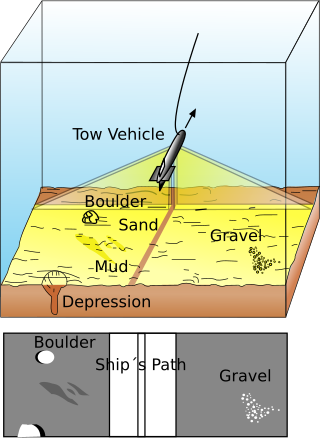
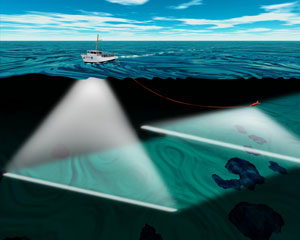
Side-scan sonar is a category of sonar system that is used to efficiently create an image of large areas of the sea floor.

Underwater archaeology is archaeology practiced underwater. As with all other branches of archaeology, it evolved from its roots in pre-history and in the classical era to include sites from the historical and industrial eras.

Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore wind farms, offshore oil exploration and drilling and related activities. Surveys may also be conducted to determine the route of subsea cables such as telecommunications cables, cables associated with wind farms, and HVDC power cables. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.

A remotely operated underwater vehicle (ROUV) or remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform underwater observation, inspection and physical tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry, military, scientific and other applications. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.

Synthetic-aperture sonar (SAS) is a form of sonar in which sophisticated post-processing of sonar data is used in ways closely analogous to synthetic-aperture radar.

The Monterey Bay Aquarium Research Institute (MBARI) is a private, non-profit oceanographic research center in Moss Landing, California. MBARI was founded in 1987 by David Packard, and is primarily funded by the David and Lucile Packard Foundation. Christopher Scholin serves as the institute's president and chief executive officer, managing a work force of approximately 220 scientists, engineers, and operations and administrative staff.

Unmanned underwater vehicles (UUV), also known as uncrewed underwater vehicles and underwater drones, are submersible vehicles that can operate underwater without a human occupant. These vehicles may be divided into two categories: remotely operated underwater vehicles (ROUVs) and autonomous underwater vehicles (AUVs). ROUVs are remotely controlled by a human operator. AUVs are automated and operate independently of direct human input.

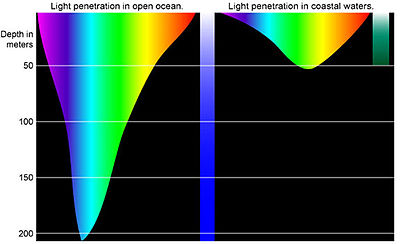
Underwater vision is the ability to see objects underwater, and this is significantly affected by several factors. Underwater, objects are less visible because of lower levels of natural illumination caused by rapid attenuation of light with distance passed through the water. They are also blurred by scattering of light between the object and the viewer, also resulting in lower contrast. These effects vary with wavelength of the light, and color and turbidity of the water. The vertebrate eye is usually either optimised for underwater vision or air vision, as is the case in the human eye. The visual acuity of the air-optimised eye is severely adversely affected by the difference in refractive index between air and water when immersed in direct contact. Provision of an airspace between the cornea and the water can compensate, but has the side effect of scale and distance distortion. The diver learns to compensate for these distortions. Artificial illumination is effective to improve illumination at short range.
Intervention AUV or I-AUV is a type of autonomous underwater vehicle. Its characteristic feature is that it is capable of autonomous interventions on the subsea installations, a task usually carried out by remotely operated underwater vehicles (ROVs) or human divers.
Acoustic seabed classification is the partitioning of a seabed acoustic image into discrete physical entities or classes. This is a particularly active area of development in the field of seabed mapping, marine geophysics, underwater acoustics and benthic habitat mapping. Seabed classification is one route to characterizing the seabed and its habitats. Seabed characterization makes the link between the classified regions and the seabed physical, geological, chemical or biological properties. Acoustic seabed classification is possible using a wide range of acoustic imaging systems including multibeam echosounders, sidescan sonar, single-beam echosounders, interferometric systems and sub-bottom profilers. Seabed classification based on acoustic properties can be divided into two main categories; surficial seabed classification and sub-surface seabed classification. Sub-surface imaging technologies use lower frequency sound to provide higher penetration, whereas surficial imaging technologies provide higher resolution imagery by utilizing higher frequencies.
An underwater acoustic positioning system is a system for the tracking and navigation of underwater vehicles or divers by means of acoustic distance and/or direction measurements, and subsequent position triangulation. Underwater acoustic positioning systems are commonly used in a wide variety of underwater work, including oil and gas exploration, ocean sciences, salvage operations, marine archaeology, law enforcement and military activities.
Bistatic sonar is a sonar configuration in which transmitter and receiver are separated by a distance large enough to be comparable to the distance to the target. Most sonar systems are monostatic, in that the transmitter and receiver are located in the same place. A configuration with multiple receivers is called multistatic.
Explorer autonomous underwater vehicle (AUV) is a Chinese AUV developed in the People's Republic of China (PRC), first entering service in November 1994. It should not be confused with another two Anglo-American AUVs that share the same name: the American Autonomous Benthic Explorer AUV (ABE) built by Woods Hole Oceanographic Institution, and the British Columbia-based International Submarine Engineering built Canadian Explorer AUV, which is based on its earlier ARCS AUV. Many Chinese AUVs later developed, such as Wukong, WZODA, CR series, Exploration series, Micro Dragon series, Sea Whale series, Submerged Dragon series AUVs, are all based on experienced gained from Explorer AUV.
Underwater searches are procedures to find a known or suspected target object or objects in a specified search area under water. They may be carried out underwater by divers, manned submersibles, remotely operated underwater vehicles, or autonomous underwater vehicles, or from the surface by other agents, including surface vessels, aircraft and cadaver dogs.
The RV Denar 2 is a Turkish research and survey vessel owned by TOMA Maritime S.A. Istanbul, Turkey and operated 2E Maritime in Istanbul, Turkey.

Ocean optics is the study of how light interacts with water and the materials in water. Although research often focuses on the sea, the field broadly includes rivers, lakes, inland waters, coastal waters, and large ocean basins. How light acts in water is critical to how ecosystems function underwater. Knowledge of ocean optics is needed in aquatic remote sensing research in order to understand what information can be extracted from the color of the water as it appears from satellite sensors in space. The color of the water as seen by satellites is known as ocean color. While ocean color is a key theme of ocean optics, optics is a broader term that also includes the development of underwater sensors using optical methods to study much more than just color, including ocean chemistry, particle size, imaging of microscopic plants and animals, and more.
An underwater survey is a survey performed in an underwater environment or conducted remotely on an underwater object or region. Survey can have several meanings. The word originates in Medieval Latin with meanings of looking over and detailed study of a subject. One meaning is the accurate measurement of a geographical region, usually with the intention of plotting the positions of features as a scale map of the region. This meaning is often used in scientific contexts, and also in civil engineering and mineral extraction. Another meaning, often used in a civil, structural, or marine engineering context, is the inspection of a structure or vessel to compare actual condition with the specified nominal condition, usually with the purpose of reporting on the actual condition and compliance with, or deviations from, the nominal condition, for quality control, damage assessment, valuation, insurance, maintenance, and similar purposes. In other contexts it can mean inspection of a region to establish presence and distribution of specified content, such as living organisms, either to establish a baseline, or to compare with a baseline.

Underwater exploration is the exploration of any underwater environment, either by direct observation by the explorer, or by remote observation and measurement under the direction of the investigators. Systematic, targeted exploration is the most effective method to increase understanding of the ocean and other underwater regions, so they can be effectively managed, conserved, regulated, and their resources discovered, accessed, and used. Less than 10% of the ocean has been mapped in any detail, less has been visually observed, and the total diversity of life and distribution of populations is similarly obscure.