
Running is a method of terrestrial locomotion allowing humans and other animals to move rapidly on foot. Running is a type of gait characterized by an aerial phase in which all feet are above the ground. This is in contrast to walking, where one foot is always in contact with the ground, the legs are kept mostly straight and the center of gravity vaults over the stance leg or legs in an inverted pendulum fashion. A feature of a running body from the viewpoint of spring-mass mechanics is that changes in kinetic and potential energy within a stride occur simultaneously, with energy storage accomplished by springy tendons and passive muscle elasticity. The term running can refer to any of a variety of speeds ranging from jogging to sprinting.

Jumping or leaping is a form of locomotion or movement in which an organism or non-living mechanical system propels itself through the air along a ballistic trajectory. Jumping can be distinguished from running, galloping and other gaits where the entire body is temporarily airborne, by the relatively long duration of the aerial phase and high angle of initial launch.
In continuum mechanics, the Froude number is a dimensionless number defined as the ratio of the flow inertia to the external field. Named after William Froude, the Froude number is based on the speed–length ratio which he defined as:

A gait is a pattern of limb movements made during locomotion. Human gaits are the various ways in which a human can move, either naturally or as a result of specialized training. Human gait is defined as bipedal, biphasic forward propulsion of the center of gravity of the human body, in which there are alternate sinuous movements of different segments of the body with least expenditure of energy. Different gait patterns are characterized by differences in limb-movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in the contact with the ground.
Inverse dynamics is an inverse problem. It commonly refers to either inverse rigid body dynamics or inverse structural dynamics. Inverse rigid-body dynamics is a method for computing forces and/or moments of force (torques) based on the kinematics (motion) of a body and the body's inertial properties. Typically it uses link-segment models to represent the mechanical behaviour of interconnected segments, such as the limbs of humans or animals or the joint extensions of robots, where given the kinematics of the various parts, inverse dynamics derives the minimum forces and moments responsible for the individual movements. In practice, inverse dynamics computes these internal moments and forces from measurements of the motion of limbs and external forces such as ground reaction forces, under a special set of assumptions.
A banked turn is a turn or change of direction in which the vehicle banks or inclines, usually towards the inside of the turn. For a road or railroad this is usually due to the roadbed having a transverse down-slope towards the inside of the curve. The bank angle is the angle at which the vehicle is inclined about its longitudinal axis with respect to the horizontal.
A gravity turn or zero-lift turn is a maneuver used in launching a spacecraft into, or descending from, an orbit around a celestial body such as a planet or a moon. It is a trajectory optimization that uses gravity to steer the vehicle onto its desired trajectory. It offers two main advantages over a trajectory controlled solely through the vehicle's own thrust. First, the thrust is not used to change the spacecraft's direction, so more of it is used to accelerate the vehicle into orbit. Second, and more importantly, during the initial ascent phase the vehicle can maintain low or even zero angle of attack. This minimizes transverse aerodynamic stress on the launch vehicle, allowing for a lighter launch vehicle.

Undulatory locomotion is the type of motion characterized by wave-like movement patterns that act to propel an animal forward. Examples of this type of gait include crawling in snakes, or swimming in the lamprey. Although this is typically the type of gait utilized by limbless animals, some creatures with limbs, such as the salamander, forgo use of their legs in certain environments and exhibit undulatory locomotion. In robotics this movement strategy is studied in order to create novel robotic devices capable of traversing a variety of environments.
Sports biomechanics is a quantitative based study and analysis of professional athletes and sports activities in general. It can simply be described as the physics of sports. In this subfield of biomechanics the laws of mechanics are applied in order to gain a greater understanding of athletic performance through mathematical modeling, computer simulation and measurement. Biomechanics is the study of the structure and function of biological systems by means of the methods of mechanics. Within mechanics there are two sub-fields of study: statics, which is the study of systems that are in a state of constant motion either at rest or moving with a constant velocity; and dynamics, which is the study of systems in motion in which acceleration is present, which may involve kinematics and kinetics. Sports biomechanists help people obtain optimal muscle recruitment and performance. A biomechanist also uses their knowledge to apply proper load barring techniques to preserve the body.
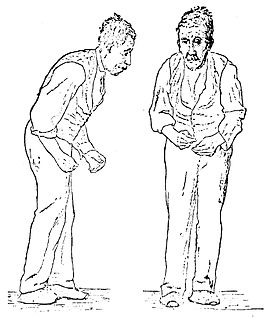
Parkinsonian gait is the type of gait exhibited by patients suffering from Parkinson's disease (PD). It is often described by people with Parkinson's as feeling like being stuck in place, when initiating a step or turning, and can increase the risk of falling. This disorder is caused by a deficiency of dopamine in the basal ganglia circuit leading to motor deficits. Gait is one of the most affected motor characteristics of this disorder although symptoms of Parkinson's disease are varied.
Human locomotion is considered to take two primary forms: walking and running. In contrast, many quadrupeds have three distinct forms of locomotion: walk, trot, and gallop. Walking is a form of locomotion defined by a double support phase when both feet are on the ground at the same time. Running is a form of locomotion that does not have this double support phase.
Obesity and walking describes how the locomotion of walking differs between an obese individual and a non-obese individual. The prevalence of obesity is becoming a worldwide problem, with the American population leading the way. In 2007-2008, prevalence rates for obesity among adult American men were approximately 32% and over 35% amongst adult American women. According to the Johns Hopkins Bloomberg School of Public Health, 66% of the American population is either overweight or obese and this number is predicted to increase to 75% by 2015. Obesity is linked to health problems such as decreased insulin sensitivity and diabetes, cardiovascular disease, cancer, sleep apnea, and joint pain such as osteoarthritis. It is thought that a major factor of obesity is that obese individuals are in a positive energy balance, meaning that they are consuming more calories than they are expending. Humans expend energy through their basal metabolic rate, the thermic effect of food, non-exercise activity thermogenesis (NEAT), and exercise. While many treatments for obesity are presented to the public, exercise in the form of walking is an easy, relatively safe activity that has the potential to move a person towards a negative energy balance and if done for a long enough time may reduce weight.
Terrestrial locomotion by means of a running gait can be accomplished on level surfaces. However, in most outdoor environments an individual will experience terrain undulations requiring uphill running. Similar conditions can be mimicked in a controlled environment on a treadmill also. Additionally, running on inclines is used by runners, both distance and sprinter, to improve cardiovascular conditioning and lower limb strength.

Limitations of animal running speed provides an overview of how various factors determine the maximum running speed. Some terrestrial animals are built for achieving extremely high speeds, such as the cheetah, pronghorn, race horse and greyhound, while humans can train to achieve high sprint speeds. There is no single determinant of maximum running speed: however, certain factors stand out against others and have been investigated in both animals and humans. These factors include: Muscle moment arms, foot morphology, muscle architecture, and muscle fiber type. Each factor contributes to the ground reaction force (GRF) and foot contact time of which the changes to increase maximal speed are not well understood across all species.
Arm swing in human bipedal walking is a natural motion wherein each arm swings with the motion of the opposing leg. Swinging arms in an opposing direction with respect to the lower limb reduces the angular momentum of the body, balancing the rotational motion produced during walking. Although such pendulum-like motion of arms is not essential for walking, recent studies point that arm swing improves the stability and energy efficiency in human locomotion. Those positive effects of arm swing have been utilized in sports, especially in racewalking and sprinting.

The mechanics of the running blades used by South African former Paralympic runner Oscar Pistorius depend on special carbon-fiber-reinforced polymer prosthetics. Pistorius has double below-the-knee amputations and competed in both non-disabled and T44 amputee athletics events. Pistorius's eligibility to run in international non-disabled events is sanctioned by the International Association of Athletics Federations (IAAF).

As originally proposed by Enoka, neuromechanics is a field of study that combines concepts from biomechanics and neurophysiology to study human movement. Neuromechanics examines the combined roles of the skeletal, muscular, and nervous systems and how they interact to produce the motion required to complete a motor task.

The effect of gait parameters on energetic cost is a relationship that describes how changes in step length, cadence, step width, and step variability influence the mechanical work and metabolic cost involved in gait. The source of this relationship stems from the deviation of these gait parameters from metabolically optimal values, with the deviations due to environmental, pathological, and other factors.
The function of the lower limbs during walking is to support the whole-body against gravitational forces while generating movement patterns which progress the body forward. Walking is an activity that is primarily confined to the sagittal plane, which is also described as the plane of progression. During one gait cycle, there are two major phases: stance and swing. In a healthy individual walking at a normal walking speed, stance phase makes up approximately 60% of one gait cycle and swing makes up the remaining 40%. The lower limbs are only in contact with the ground during stance phase which is typically subdivided into 5 events: heel contact, foot flat, mid-stance, heel off, and toe off. The majority of stance phase (~40%) takes place in single-limb support where one limb is in contact with the ground and the contralateral limb is in swing phase. During this time interval, the lower limb must support constant changes in alignment of body weight while propelling forward. The hip, knee, and ankle joints move through cyclical kinematic patterns that are controlled by muscles which cross these joints. As postural changes occur, the body adapts by motor tuning an efficient muscular pattern that will accomplish the necessary kinematics required to walk.
The study of animal locomotion is a branch of biology that investigates and quantifies how animals move.



















