The output power of a motor is the product of the torque that the motor generates and the angular velocity of its output shaft. Likewise, the power dissipated in an electrical element of a circuit is the product of the current flowing through the element and of the voltage across the element.[1][2]
Definition
Power is the rate with respect to time at which work is done or, more generally, the rate of change of total mechanical energy. It is given by: where P is power, E is the total mechanical energy (sum of kinetic and potential energy), and t is time.
For cases where only work is considered, power is also expressed as: where W is the work done on the system. However, in systems where potential energy changes without explicit work being done (e.g., changing fields or conservative forces), the total energy definition is more general.
We will now show that the mechanical power generated by a force on a body moving at the velocity can be expressed as the product:
If a constant force is applied throughout a distance, the work done is defined as . In this case, power can be written as:
If instead the force is variable over a three-dimensional curve , then the work is expressed in terms of the line integral:
In older works, power is sometimes called activity.[3][4][5]
Units
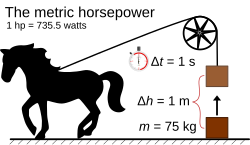
The dimension of power is energy divided by time. In the International System of Units (SI), the unit of power is the watt (W), which is equal to one joule per second. Other common and traditional measures are horsepower (hp), comparing to the power of a horse; one mechanical horsepower equals about 745.7 watts. Other units of power include ergs per second (erg/s), foot-pounds per minute, dBm, a logarithmic measure relative to a reference of 1 milliwatt, calories per hour, BTU per hour (BTU/h), and tons of refrigeration.
Average power and instantaneous power
As a simple example, burning one kilogram of coal releases more energy than detonating a kilogram of TNT,[6] but because the TNT reaction releases energy more quickly, it delivers more power than the coal. If ΔW is the amount of work performed during a period of time of duration Δt, the average power Pavg over that period is given by the formula It is the average amount of work done or energy converted per unit of time. Average power is often called "power" when the context makes it clear.
Instantaneous power is the limiting value of the average power as the time interval Δt approaches zero.
When power P is constant, the amount of work performed in time period t can be calculated as
In the context of energy conversion, it is more customary to use the symbol E rather than W.
Power in mechanical systems is the combination of forces and movement. In particular, power is the product of a force on an object and the object's velocity, or the product of a torque on a shaft and the shaft's angular velocity.
Mechanical power is also described as the time derivative of work. In mechanics, the work done by a force F on an object that travels along a curve C is given by the line integral: where x defines the path C and v is the velocity along this path.
If the force F is derivable from a potential (conservative), then applying the gradient theorem (and remembering that force is the negative of the gradient of the potential energy) yields: where A and B are the beginning and end of the path along which the work was done.
The power at any point along the curve C is the time derivative:
If a mechanical system has no losses, then the input power must equal the output power. This provides a simple formula for the mechanical advantage of the system.
Let the input power to a device be a force FA acting on a point that moves with velocity vA and the output power be a force FB acts on a point that moves with velocity vB. If there are no losses in the system, then and the mechanical advantage of the system (output force per input force) is given by
The similar relationship is obtained for rotating systems, where TA and ωA are the torque and angular velocity of the input and TB and ωB are the torque and angular velocity of the output. If there are no losses in the system, then which yields the mechanical advantage
These relations are important because they define the maximum performance of a device in terms of velocity ratios determined by its physical dimensions. See for example gear ratios.
In a train of identical pulses, the instantaneous power is a periodic function of time. The ratio of the pulse duration to the period is equal to the ratio of the average power to the peak power. It is also called the duty cycle (see text for definitions).
In the case of a periodic signal of period , like a train of identical pulses, the instantaneous power is also a periodic function of period . The peak power is simply defined by:
The peak power is not always readily measurable, however, and the measurement of the average power is more commonly performed by an instrument. If one defines the energy per pulse as then the average power is
One may define the pulse length such that so that the ratios are equal. These ratios are called the duty cycle of the pulse train.
Radiant power
Power is related to intensity at a radius ; the power emitted by a source can be written as:[citation needed]
↑Fowle, Frederick E., ed. (1921). Smithsonian Physical Tables (7th reviseded.). Washington, D.C.: Smithsonian Institution. OCLC1142734534. Archived from the original on 23 April 2020. Power or Activity is the time rate of doing work, or if W represents work and P power, P = dw/dt. (p. xxviii) ... ACTIVITY. Power or rate of doing work; unit, the watt. (p. 435)
↑Heron, C. A. (1906). "Electrical Calculations for Railway Motors". Purdue Eng. Rev. (2): 77–93. Archived from the original on 23 April 2020. Retrieved 23 April 2020. The activity of a motor is the work done per second, ... Where the joule is employed as the unit of work, the international unit of activity is the joule-per-second, or, as it is commonly called, the watt. (p. 78)
↑Burning coal produces around 15-30 megajoules per kilogram, while detonating TNT produces about 4.7 megajoules per kilogram. For the coal value, see Fisher, Juliya (2003). "Energy Density of Coal". The Physics Factbook. Retrieved 30 May 2011. For the TNT value, see the article TNT equivalent. Neither value includes the weight of oxygen from the air used during combustion.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.