This article needs attention from an expert in Physics. The specific problem is: Too much unsourced technical information.WikiProject Physics may be able to help recruit an expert.(March 2026)
In kinematics, circular motion is movement of an object along a circle or rotation along a circular arc. It can be uniform, with a constant rate of rotation and constant tangential speed, or non-uniform with a changing rate of rotation. The rotation around a fixed axis of a three-dimensional body involves the circular motion of its parts. The equations of motion describe the movement of the center of mass of a body, which remains at a constant distance from the axis of rotation. In circular motion, the distance between the body and a fixed point on its surface remains the same, i.e., the body is assumed rigid.
Examples of circular motion include: special satellite orbits around the Earth (circular orbits), a ceiling fan's blades rotating around a hub, a stone that is tied to a rope and is being swung in circles, a car turning through a curve in a race track, an electron moving perpendicular to a uniform magnetic field, and a gear turning inside a mechanism.
Since the object's velocity vector is constantly changing direction, the moving object is undergoing acceleration by a centripetal force in the direction of the center of rotation. Without this acceleration, the object would move in a straight line, according to Newton's laws of motion.
Uniform circular motion
Figure 1: Velocity v and acceleration a in uniform circular motion at angular rate ω; the speed is constant, but the velocity is always tangential to the orbit; the acceleration has constant magnitude, but always points toward the center of rotation.Figure 2: The velocity vectors at time t and time t + dt are moved from the orbit on the left to new positions where their tails coincide, on the right. Because the velocity is fixed in magnitude at v = rω, the velocity vectors also sweep out a circular path at angular rate ω. As dt → 0, the acceleration vector a becomes perpendicular to v, which means it points toward the center of the orbit in the circle on the left. Angle ωdt is the very small angle between the two velocities and tends to zero as dt → 0.Figure 3: (Left) Ball in a circular motion – rope provides centripetal force to keep the ball in a circle (Right) Rope is cut and the ball continues in a straight line with the velocity at the time of cutting the rope, in accord with Newton's law of inertia, because centripetal force is no longer there.
In physics, uniform circular motion describes the motion of a body traversing a circular path at a constant speed. Since the body describes circular motion, its distance from the axis of rotation remains constant at all times. Though the body's speed is constant, its velocity is not constant: velocity, a vector quantity, depends on both the body's speed and its direction of travel. This changing velocity indicates the presence of an acceleration; this centripetal acceleration is of constant magnitude and directed at all times toward the axis of rotation. This acceleration is, in turn, produced by a centripetal force which is also constant in magnitude and directed toward the axis of rotation.
In the case of rotation around a fixed axis of a rigid body that is not negligibly small compared to the radius of the path, each particle of the body describes a uniform circular motion with the same angular velocity, but with velocity and acceleration varying with the position with respect to the axis.
Formula
Figure 1: Vector relationships for uniform circular motion; vector Ω representing the rotation is normal to the plane of the orbit.
For motion in a circle of radiusr, the circumference of the circle is C = 2πr. If the period for one rotation is T, the angular rate of rotation, also known as angular velocity, ω is: and the units are radians/second.
The vector relationships are shown in Figure 1. The axis of rotation is shown as a vector ω perpendicular to the plane of the orbit and with a magnitude ω = dθ / dt. The direction of ω is chosen using the right-hand rule. With this convention for depicting rotation, the velocity is given by a vector cross product as which is a vector perpendicular to both ω and r(t), tangential to the orbit, and of magnitude ωr. Likewise, the acceleration is given by which is a vector perpendicular to both ω and v(t) of magnitude ω|v| = ω2r and directed exactly opposite to r(t).[1]
In the simplest case the speed, mass, and radius are constant.
Figure 4: Polar coordinates for circular trajectory. On the left is a unit circle showing the changes and in the unit vectors and for a small increment in angle .
During circular motion, the body moves on a curve that can be described in the polar coordinate system as a fixed distance R from the center of the orbit taken as the origin, oriented at an angle θ(t) from some reference direction. See Figure 4. The displacement vector is the radial vector from the origin to the particle location: where is the unit vector parallel to the radius vector at time t and pointing away from the origin. It is convenient to introduce the unit vector orthogonal to as well, namely . It is customary to orient to point in the direction of travel along the orbit.
The velocity is the time derivative of the displacement:
Because the radius of the circle is constant, the radial component of the velocity is zero. The unit vector has a time-invariant magnitude of unity, so as time varies its tip always lies on a circle of unit radius, with an angle θ the same as the angle of . If the particle displacement rotates through an angle dθ in time dt, so does , describing an arc on the unit circle of magnitude dθ. See the unit circle at the left of Figure 4. Hence: where the direction of the change must be perpendicular to (or, in other words, along ) because any change in the direction of would change the size of . The sign is positive because an increase in dθ implies the object and have moved in the direction of . Hence the velocity becomes:
The acceleration of the body can also be broken into radial and tangential components. The acceleration is the time derivative of the velocity:
The time derivative of is found the same way as for . Again, is a unit vector and its tip traces a unit circle with an angle that is π/2 + θ. Hence, an increase in angle dθ by implies traces an arc of magnitude dθ, and as is orthogonal to , we have: where a negative sign is necessary to keep orthogonal to . (Otherwise, the angle between and would decrease with an increase in dθ.) See the unit circle at the left of Figure 4. Consequently, the acceleration is:
The centripetal acceleration is the radial component, which is directed radially inward: while the tangential component changes the magnitude of the velocity:
Using complex numbers
Circular motion can be described using complex numbers and Euler's Formula. Let the x axis be the real axis and the axis be the imaginary axis. The position of the body can then be given as , a complex "vector": where i is the imaginary unit, and is the argument of the complex number as a function of time, t.
Since the radius is constant: where a dot indicates differentiation in respect of time.
With this notation, the velocity becomes: and the acceleration becomes:
The first term is opposite in direction to the displacement vector and the second is perpendicular to it, just like the earlier results shown before.
Velocity
Figure 1 illustrates velocity and acceleration vectors for uniform motion at four different points in the orbit. Because the velocity v is tangent to the circular path, no two velocities point in the same direction. Although the object has a constant speed, its direction is always changing. This change in velocity is caused by an acceleration a, whose magnitude is (like that of the velocity) held constant, but whose direction also is always changing. The acceleration points radially inwards (centripetally) and is perpendicular to the velocity. This acceleration is known as centripetal acceleration.
For a path of radius r, when an angle θ is swept out, the distance traveled on the periphery of the orbit is s = rθ. Therefore, the speed of travel around the orbit is where the angular rate of rotation is ω. (By rearrangement, ω = v/r.) Thus, v is a constant, and the velocity vector v also rotates with constant magnitude v, at the same angular rate ω.
Relativistic circular motion
In this case, the three-acceleration vector is perpendicular to the three-velocity vector, and the square of proper acceleration, expressed as a scalar invariant, the same in all reference frames, becomes the expression for circular motion, or, taking the positive square root and using the three-acceleration, we arrive at the proper acceleration for circular motion:
The left-hand circle in Figure 2 is the orbit showing the velocity vectors at two adjacent times. On the right, these two velocities are moved so their tails coincide. Because speed is constant, the velocity vectors on the right sweep out a circle as time advances. For a swept angle dθ = ωdt the change in v is a vector at right angles to v and of magnitude vdθ, which in turn means that the magnitude of the acceleration is given by
Centripetal acceleration for some values of radius and magnitude of velocity
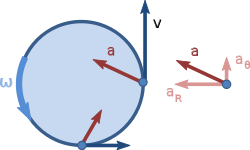
Velocity and acceleration in non-uniform circular motion.
In non-uniform circular motion, an object moves in a circular path with varying speed. Since the speed is changing, there is tangential acceleration in addition to normal acceleration.
The net acceleration is directed towards the interior of the circle (but does not pass through its center).
The net acceleration may be resolved into two components: tangential acceleration and centripetal acceleration. Unlike tangential acceleration, centripetal acceleration is present in both uniform and non-uniform circular motion.
This diagram shows the normal force (n) pointing in other directions rather than opposite to the weight force.
In non-uniform circular motion, the normal force does not always point to the opposite direction of weight.
Here, 'n' is the normal force.
The normal force is actually the sum of the radial and tangential forces. The component of weight force is responsible for the tangential force (when we neglect friction). The centripetal force is due to the change in the direction of velocity.
The normal force and weight may also point in the same direction. Both forces can point downwards, yet the object will remain in a circular path without falling down.
The normal force can point downwards.
The normal force can point downwards. Considering that the object is a person sitting inside a plane moving in a circle, the two forces (weight and normal force) will point down only when the plane reaches the top of the circle. The reason for this is that the normal force is the sum of the tangential force and centripetal force. The tangential force is zero at the top (as no work is performed when the motion is perpendicular to the direction of force). Since weight is perpendicular to the direction of motion of the object at the top of the circle and the centripetal force points downwards, the normal force will point down as well.
From a logical standpoint, a person travelling in that plane will be upside down at the top of the circle. At that moment, the person's seat is actually pushing down on the person, which is the normal force.
The reason why an object does not fall down when subjected to only downward forces is a simple one. Once an object is thrown into the air, there is only the downward gravitational force that acts on the object. That does not mean that once an object is thrown into the air, it will fall instantly. The velocity of the object keeps it up in the air. The first of Newton's laws of motion states that an object's inertia keeps it in motion; since the object in the air has a velocity, it will tend to keep moving in that direction.
A varying angular speed for an object moving in a circular path can also be achieved if the rotating body does not have a homogeneous mass distribution.[2]
One can deduce the formulae of speed, acceleration and jerk, assuming that all the variables depend on :
Further transformations may involve and their corresponding derivatives:
Applications
Solving applications dealing with non-uniform circular motion involves force analysis. With a uniform circular motion, the only force acting upon an object traveling in a circle is the centripetal force. In a non-uniform circular motion, there are additional forces acting on the object due to a non-zero tangential acceleration. Although there are forces acting upon the object, the sum of all the forces acting on the object will have to be equal to the centripetal force.
Radial acceleration is used when calculating the total force. Tangential acceleration is not used in calculating total force because it is not responsible for keeping the object in a circular path. The only acceleration responsible for keeping an object moving in a circle is the radial acceleration. Since the sum of all forces is the centripetal force, drawing centripetal force into a free body diagram is not necessary and usually not recommended.
Using , we can draw free body diagrams to list all the forces acting on an object and then set it equal to . Afterward, we can solve for whatever is unknown (this can be mass, velocity, radius of curvature, coefficient of friction, normal force, etc.). For example, the visual above showing an object at the top of a semicircle would be expressed as .
In a uniform circular motion, the total acceleration of an object in a circular path is equal to the radial acceleration. Due to the presence of tangential acceleration in a non uniform circular motion, that does not hold true any more. To find the total acceleration of an object in a non uniform circular, find the vector sum of the tangential acceleration and the radial acceleration.
Radial acceleration is still equal to . Tangential acceleration is simply the derivative of the speed at any given point: . This root sum of squares of separate radial and tangential accelerations is only correct for circular motion; for general motion within a plane with polar coordinates , the Coriolis term should be added to , whereas radial acceleration then becomes .
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.