The shape of the magnetic fields around the permanent magnet and the electromagnet are revealed by the orientation of the iron filings.
In electromagnetism, the magnetic field, is a physical property of space that quantifies the magnetic strength at a given location. Magnetic fields deflect moving electric charges (including electric currents), apply torques on magnets to twist them in the direction of the magnetic field, and attract or repel magnets and magnetic material such as iron. In addition, a time varying magnetic field can induce electrical currents.
Magnetic fields are created by magnetic materials and by moving electric charges (including electrical current). The latter is important in creating electromagnets: devices that precisely control magnetic fields by changing the current through the electromagnet.
Since both strength and direction of a magnetic field may vary with location, it is described mathematically by a function assigning a vector to each point of space, called a vector field[note 1].
There are two different, but closely related vector fields which are called "magnetic field". These are written as B and H.[note 2] While the best names for these fields is the subject of long running debate, the underlying physics is uncontested.[1] Historically, the term "magnetic field" was reserved for H while using other terms for B, but many recent textbooks use the term "magnetic field" to describe B as well as or in place of H.[note 3] There are many alternative names for both (see sidebars in the corresponding sections).
Also known as magnetic flux density, the magnetic B field is the "magnetic field" responsible for magnetic forces, magnetic torques and electromagnetic induction. Therefore it can be defined by any equation that describes these phenomena.
A charged particle moving with velocity v in a magnetic field B feels a magnetic force F whose direction is determined by the right hand rule.
For example, the magnetic field vector B at any point can be defined as the vector field that, when used in the Lorentz force law, correctly predicts the force on a moving charged particle at that point:[5][6]:204
Here F is the force on the particle, q is the particle's electric charge, E is the external electric field, v, is the particle's velocity, and × denotes the cross product. The direction of force on the charge can be determined by the right-hand rule (see the figure).
[T]he command, "Measure the direction and magnitude of the vector B at such and such a place," calls for the following operations: Take a particle of known charge q. Measure the force on q at rest, to determine E. Then measure the force on the particle when its velocity is v; repeat with v in some other direction. Now find a B that makes the Lorentz force law fit all these results—that is the magnetic field at the place in question.
The SI unit of B is tesla (symbol: T).[note 4] The Gaussian-cgs unit of B is the gauss (symbol: G). (The conversion is 1T ≘ 10000G.[7][8]) One nanotesla corresponds to 1 gamma (symbol: γ).[8]
While the magnetic B field is needed to determine the magnetic forces and torques on objects, it is not always convenient to calculate. This stems from the fact that the magnetic B field is not only due to the currents that are directly controlled by the experimenter (or electrical device) but also by the magnetic fields created by any magnetization induced in nearby magnetic matter. This problem is averted (in many cases) by defining the magnetic H field[note 5] such that:
Defined this way, the component of the H-field due to the magnetization of nearby magnetic material[note 6] can, in certain cases, be zero [note 7] or irrelevant for certain quantities.[note 8] While often true in practice, it is not always true. In any case, the B-field still needs to be calculated from the calculated H-field if forces, torques, or energy changes need to be calculated.
The SI unit of the H-field is the ampere per metre (A/m),[11] and the Gaussian unit is the oersted (Oe).[7][5]:286
Left: the direction of magnetic field lines represented by iron filings sprinkled on paper placed above a bar magnet. Right: compass needles point in the direction of the local magnetic field, towards a magnet's south pole and away from its north pole.
Magnetic field can be visualized by a set of magnetic field lines, that follow the direction of the field at each point. The lines can be constructed by measuring the strength and direction of the magnetic field at a large number of points (or at every point in space). Then, mark each location with an short arrow (called a vector) pointing in the direction of the local magnetic field. Connecting these arrows then forms a set of magnetic field lines. The direction of the magnetic field at any point is parallel to the direction of nearby field lines, and the local density of field lines can be made proportional to its strength. Magnetic field lines are like streamlines in fluid flow, in that they represent a continuous distribution, and a different resolution would show more or fewer lines.
An advantage of using magnetic field lines as a representation is that many laws of magnetism (and electromagnetism) can be stated completely and concisely using simple concepts such as the "number" of field lines through a surface. These concepts can then be "translated" to their mathematical form. For example, the number of field lines through a given surface is the surface integral of the magnetic field.[5]:237
Various phenomena "display" magnetic field lines as though the field lines were physical phenomena. For example, iron filings placed in a magnetic field form lines that correspond to "field lines".[note 9] Magnetic field "lines" are also visually displayed in polar auroras, in which plasma particle dipole interactions create visible streaks of light that line up with the local direction of Earth's magnetic field.
Field lines can be used as a qualitative tool to visualize magnetic forces. In ferromagnetic substances like iron and in plasmas, magnetic forces can be understood by imagining that the field lines exert a tension, (like a rubber band) along their length, and a pressure perpendicular to their length on neighboring field lines. "Unlike" poles of magnets attract because they are linked by many field lines; "like" poles repel because their field lines do not meet, but run parallel, pushing on each other.
Permanent magnets are objects that produce their own persistent magnetic fields. They are made of ferromagnetic[note 10] materials, such as iron and nickel, that have been magnetized. They have both a north and a south pole.
Modeling the magnetic field of permanent magnets can be quite complicated, especially near the magnet. The magnetic field of a small[note 11] magnet is proportional to the magnet's strength (called its magnetic dipole momentm). The equations are non-trivial and depend on the distance from the magnet and the orientation of the magnet. For simple magnets, m points in the direction of a line drawn from the south to the north pole of the magnet. Flipping a bar magnet is equivalent to rotating its m by 180 degrees.
The magnetic field of permanent magnets (and of all magnetized material) is created at the atomic level. The proper description of this effect involves quantum mechanics and even relativity. Fortunately, the net effect of adding up these magnetic interactions can often be calculated using much simpler models for the magnetic field created by the constituent atoms in the magnetic material. This occurs because at large enough distance (or equivalently for small enough magnets) the magnetic field of any magnetic object can be described by a single (vector) quantity, the magnetic dipole moment, m. Objects that can be modeled this way, for example atoms, are called magnetic dipoles. The magnetic field produced by the magnet then is the net magnetic field of these dipoles. Too, the net force on the magnet is a result of adding up the forces on the individual dipoles.
There are two simplified models for the nature of these dipoles: the Amperian loop model and the magnetic pole model. These two models produce two different magnetic fields, B and H, respectively.
A realistic model of magnetism is more complicated than either of these models, but the Amperian loop model is generally better and often sufficient. For example, this model predicts that the motion of electrons within an atom are connected to those electrons' orbital magnetic dipole moment, and these orbital moments do contribute to the magnetism seen at the macroscopic level.
The magnetic pole model, on the other hand, is incorrect about the nature of magnetism (magnetic charges do not exist) and predicts the wrong forces and torques for magnetic dipoles and moving charges inside of a magnet. It, however, has the advantage of simplicity and (with care) can be used to correctly predict the forces between large magnets and the magnetic H fields (both inside and out) of magnets.
A current loop (ring) that goes into the page at the x and comes out at the dot produces a B-field (lines). As the radius of the current loop shrinks, the fields produced become identical to an abstract "magnetostatic dipole" (represented by an arrow pointing to the right).
In this model developed by Ampere, the elementary magnetic dipole that makes up all magnets is a sufficiently small Amperian loop with current I and loop area a. Such a current loop has a magnetic dipole moment m of
Definition of the magnetic dipole moment(vector form, SI units)
where the direction of m is perpendicular to the area of the loop, a, and depends on the direction of the current using the right-hand rule.
These magnetic dipoles produce a magnetic B-field.
The magnetic field of a magnetic dipole is depicted in the figure. From outside, the ideal magnetic dipole is identical to that of an ideal electric dipole of the same strength. An ideal magnetic dipole is modeled as a real magnetic dipole whose area a has been reduced to zero and its current I increased to infinity such that the product m = Ia is finite.
The magnetic pole model: two opposing poles, North (+) and South (−), separated by a distance d produce a H-field (lines).
Unlike the amperian loop model, the magnetic pole model has no basis in physical reality.[6]:258 However its mathematical simplicity combined with the fact that it can lead to correct results, makes it useful if used correctly.
In this model, a magnetic H-field is produced by fictitious magnetic charges that are spread over the surface of a magnetic pole with each magnet having both a north and a south pole having opposite 'charges'. A north pole feels a force in the direction of the H-field while the force on the south pole is opposite to the H-field. Near the north pole, therefore, all H-field lines point away from the north pole (whether inside the magnet or out) while near the south pole all H-field lines point toward the south pole (whether inside the magnet or out). The H-field, therefore, is analogous to the electric fieldE and, provided the equivalent 'magnetic charge' of the poles can be estimated, then all of the tools used for calculating E can be used to calculate H.
In the magnetic pole model, the elementary magnetic dipole m is formed by two opposite magnetic poles of pole strength qm separated by a small distance vector d, such that m = qmd. The magnetic pole model predicts correctly the field H both inside and outside magnetic materials, in particular the fact that H is opposite to the magnetization field M inside a permanent magnet.
Since it is based on the fictitious idea of a magnetic charge density, the pole model has limitations. Magnetic poles cannot exist apart from each other as electric charges can, but always come in north–south pairs. If a magnetized object is divided in half, a new pole appears on the surface of each piece, so each has a pair of complementary poles. The magnetic pole model does not account for magnetism that is produced by electric currents, nor the inherent connection between angular momentum and magnetism.
The pole model usually treats magnetic charge as a mathematical abstraction, rather than a physical property of particles. However, a magnetic monopole is a hypothetical particle (or class of particles) that physically has only one magnetic pole (either a north pole or a south pole). In other words, it would possess a "magnetic charge" analogous to an electric charge. Magnetic field lines would start or end on magnetic monopoles, so if they exist, they would give exceptions to the rule that magnetic field lines neither start nor end. Some theories (such as Grand Unified Theories) have predicted the existence of magnetic monopoles, but so far, none have been observed.
Specifying the force between two small magnets is quite complicated because it depends on the strength and orientation of both magnets and their distance and direction relative to each other. The force is particularly sensitive to rotations of the magnets due to magnetic torque. The force on each magnet depends on its magnetic moment and the magnetic field[note 12] of the other.
To understand the force between magnets, it is useful to examine the magnetic pole model given above. In this model, the H-field of one magnet pushes and pulls on both poles of a second magnet. If this H-field is the same at both poles of the second magnet then there is no net force on that magnet since the force is opposite for opposite poles. If, however, the magnetic field of the first magnet is nonuniform (such as the H near one of its poles), each pole of the second magnet sees a different field and is subject to a different force. This difference in the two forces moves the magnet in the direction of increasing magnetic field and may also cause a net torque.
This is a specific example of a general rule that magnets are attracted (or repulsed depending on the orientation of the magnet) into regions of higher magnetic field. Any non-uniform magnetic field, whether caused by permanent magnets or electric currents, exerts a force on a small magnet in this way.
The details of the Amperian loop model are different and more complicated but yield the same result: that magnetic dipoles are attracted/repelled into regions of higher magnetic field. Mathematically, the force on a small magnet having a magnetic moment m due to a magnetic field B is:[14]:Eq. 11.42
where the gradient∇ is the change of the quantity m · B per unit distance and the direction is that of maximum increase of m · B. The dot productm · B = mBcos(θ), where m and B represent the magnitude of the m and B vectors and θ is the angle between them. If m is in the same direction as B then the dot product is positive and the gradient points "uphill" pulling the magnet into regions of higher B-field (more strictly larger m · B). This equation is strictly only valid for magnets of zero size, but is often a good approximation for not too large magnets. The magnetic force on larger magnets is determined by dividing them into smaller regions each having their own m then summing up the forces on each of these very small regions.
If two like poles of two separate magnets are brought near each other, and one of the magnets is allowed to turn, it promptly rotates to align itself with the first. In this example, the magnetic field of the stationary magnet creates a magnetic torque on the magnet that is free to rotate. This magnetic torque τ tends to align a magnet's poles with the magnetic field lines. A compass, therefore, turns to align itself with Earth's magnetic field.
Torque on a dipole
In the pole model of a dipole, an H field (to right) causes equal but opposite forces on a N pole (+q) and a S pole (−q) creating a torque.
Equivalently, a B field induces the same torque on a current loop with the same magnetic dipole moment.
Mathematically, the torque τ on a small magnet is proportional both to the applied magnetic field and to the magnetic moment m of the magnet:
where × represents the vector cross product. This equation includes all of the qualitative information included above. There is no torque on a magnet if m is in the same direction as the magnetic field, since the cross product is zero for two vectors that are in the same direction. Further, all other orientations feel a torque that twists them toward the direction of magnetic field.
Interactions with electric currents
Currents of electric charges both generate a magnetic field and feel a force due to magnetic B-fields.
Magnetic field due to moving charges and electric currents
Right hand grip rule: a current flowing in the direction of the white arrow produces a magnetic field shown by the red arrows.
All moving charged particles produce magnetic fields. Moving point charges, such as electrons, produce complicated but well known magnetic fields that depend on the charge, velocity, and acceleration of the particles.[15] These equations become much simpler when the moving charges form a steady state electrical current, the study of which is called magnetostatics.
In general, magnetic field lines form concentric circles around a current-carrying wire. The direction of such a magnetic field can be determined by using the "right-hand grip rule" (see figure at right). The strength of the magnetic field decreases with distance from the wire. (For an infinite length wire the strength is inversely proportional to the distance.)
A Solenoid with electric current running through it behaves like a magnet.
Bending a current-carrying wire into a loop concentrates the magnetic field inside the loop while weakening it outside. Bending a wire into multiple closely spaced loops to form a coil or "solenoid" enhances this effect. A device so formed around an iron core may act as an electromagnet, generating a strong, well-controlled magnetic field. An infinitely long cylindrical electromagnet has a uniform magnetic field inside, and no magnetic field outside. A finite length electromagnet produces a magnetic field that looks similar to that produced by a uniform permanent magnet, with its strength and polarity determined by the current flowing through the coil.
More specifically, the magnetic field generated by a steady current I (a constant flow of electric charges, in which charge neither accumulates nor is depleted at any point)[note 13] is described by the Biot–Savart law:[16]:224
where the integral sums over the wire length where vector dℓ is the vector line element with direction in the same sense as the current I, μ0 is the magnetic constant, r is the distance between the location of dℓ and the location where the magnetic field is calculated, and r̂ is a unit vector in the direction of r.
For example, applying the Bio-Savart law to the special case of a sufficiently long, straight wire, the magnetic field equations become:
where the line integral is over any arbitrary loop and is the current enclosed by that loop. Ampère's law is always valid for steady currents and can be used to calculate the B-field for certain highly symmetric situations such as an infinite wire or an infinite solenoid.
In a modified form that accounts for time varying electric fields, Ampère's law is one of four Maxwell's equations that describe electricity and magnetism.
A charged particle moving in a B-field experiences a sideways force that is proportional to the strength of the magnetic field, the component of the velocity that is perpendicular to the magnetic field and the charge of the particle. This force is known as the Lorentz force, and is given by where F is the force, q is the electric charge of the particle, v is the instantaneous velocity of the particle, and B is the magnetic field (in teslas).
The Lorentz force is always perpendicular to both the velocity of the particle and the magnetic field that created it. When a charged particle moves in a static magnetic field, it traces a helical path in which the helix axis is parallel to the magnetic field, and in which the speed of the particle remains constant. Because the magnetic force is always perpendicular to the motion, the magnetic field can do no work on an isolated charge.[18][19] It can only do work indirectly, via the electric field generated by a changing magnetic field. It is often claimed that the magnetic force can do work to a non-elementary magnetic dipole, or to charged particles whose motion is constrained by other forces, but this is incorrect[20] because the work in those cases is performed by the electric forces of the charges deflected by the magnetic field.
The force on a current carrying wire is similar to that of a moving charge as expected since a current carrying wire is a collection of moving charges. A current-carrying wire feels a force in the presence of a magnetic field. The Lorentz force on a macroscopic current is often referred to as the Laplace force. Consider a conductor of length ℓ, cross section A, and charge q due to electric current i. If this conductor is placed in a magnetic field of magnitude B that makes an angle θ with the velocity of charges in the conductor, the force exerted on a single charge q is so, for N charges where the force exerted on the conductor is where i = nqvA.
Relation between H and B
The formulas derived for the magnetic field above are correct when dealing with the entire current. A magnetic material placed inside a magnetic field, though, generates its own bound current, which can be a challenge to calculate. (This bound current is due to the sum of atomic sized current loops and the spin of the subatomic particles such as electrons that make up the material.) The H-field as defined above helps factor out this bound current; but to see how, it helps to introduce the concept of magnetization first.
The magnetization vector field M represents how strongly a region of material is magnetized. It is defined as the net magnetic dipole moment per unit volume of that region. The magnetization of a uniform magnet is therefore a material constant, equal to the magnetic moment m of the magnet divided by its volume. Since the SI unit of magnetic moment is A⋅m2, the SI unit of magnetization M is ampere per meter, identical to that of the H-field.
The magnetization M field of a region points in the direction of the average magnetic dipole moment in that region. Magnetization field lines, therefore, begin near the magnetic south pole and ends near the magnetic north pole. (Magnetization does not exist outside the magnet.)
In the Amperian loop model, the magnetization is due to combining many tiny Amperian loops to form a resultant current called bound current. This bound current, then, is the source of the magnetic B field due to the magnet. Given the definition of the magnetic dipole, the magnetization field follows a similar law to that of Ampere's law:[21] where the integral is a line integral over any closed loop and Ib is the bound current enclosed by that closed loop.
In the magnetic pole model, magnetization begins at and ends at magnetic poles. If a given region, therefore, has a net positive "magnetic pole strength" (corresponding to a north pole) then it has more magnetization field lines entering it than leaving it. Mathematically this is equivalent to: where the integral is a closed surface integral over the closed surface S and qM is the "magnetic charge" (in units of magnetic flux) enclosed by S. (A closed surface completely surrounds a region with no holes to let any field lines escape.) The negative sign occurs because the magnetization field moves from south to north.
H-field and magnetic materials
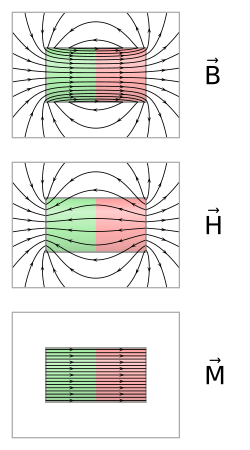
Comparison of B, H and M inside and outside a cylindrical bar magnet.
In SI units, the H-field is related to the B-field by
In terms of the H-field, Ampere's law is where If represents the 'free current' enclosed by the loop so that the line integral of H does not depend at all on the bound currents.[22]
For the differential equivalent of this equation see Maxwell's equations. Ampere's law leads to the boundary condition where Kf is the surface free current density and the unit normal points in the direction from medium 2 to medium 1.[23]
Similarly, a surface integral of H over any closed surface is independent of the free currents and picks out the "magnetic charges" within that closed surface:
which does not depend on the free currents.
The H-field, therefore, can be separated into two[note 15] independent parts:
where H0 is the applied magnetic field due only to the free currents and Hd is the demagnetizing field due only to the bound currents.
The magnetic H-field, therefore, re-factors the bound current in terms of "magnetic charges". The H field lines loop only around "free current" and, unlike the magnetic B field, begins and ends near magnetic poles as well.
Most materials respond to an applied B-field by producing their own magnetization M and therefore their own B-fields. Typically, the response is weak and exists only when the magnetic field is applied. The term magnetism describes how materials respond on the microscopic level to an applied magnetic field and is used to categorize the magnetic phase of a material. Materials are divided into groups based upon their magnetic behavior:
Superconductors (and ferromagnetic superconductors)[27][28] are materials that are characterized by perfect conductivity below a critical temperature and magnetic field. They also are highly magnetic and can be perfect diamagnets below a lower critical magnetic field. Superconductors often have a broad range of temperatures and magnetic fields (the so-named mixed state) under which they exhibit a complex hysteretic dependence of M on B.
In the case of paramagnetism and diamagnetism, the magnetization M is often proportional to the applied magnetic field such that: where μ is a material dependent parameter called the permeability. In some cases the permeability may be a second rank tensor so that H may not point in the same direction as B. These relations between B and H are examples of constitutive equations. However, superconductors and ferromagnets have a more complex B-to-H relation; see magnetic hysteresis.
Energy is needed to generate a magnetic field both to work against the electric field that a changing magnetic field creates and to change the magnetization of any material within the magnetic field. For non-dispersive materials, this same energy is released when the magnetic field is destroyed so that the energy can be modeled as being stored in the magnetic field.
For linear, non-dispersive, materials (such that B = μH where μ is frequency-independent), the energy density is:
If there are no magnetic materials around then μ can be replaced by μ0. The above equation cannot be used for nonlinear materials, though; a more general expression given below must be used.
In general, the incremental amount of work per unit volume δW needed to cause a small change of magnetic field δB is:
Once the relationship between H and B is known this equation is used to determine the work needed to reach a given magnetic state. For hysteretic materials such as ferromagnets and superconductors, the work needed also depends on how the magnetic field is created. For linear non-dispersive materials, though, the general equation leads directly to the simpler energy density equation given above.
Like all vector fields, a magnetic field has two important mathematical properties that relates it to its sources. (For B the sources are currents and changing electric fields.) These two properties, along with the two corresponding properties of the electric field, make up Maxwell's Equations. Maxwell's Equations together with the Lorentz force law form a complete description of classical electrodynamics including both electricity and magnetism.
The first property is the divergence of a vector field A, ∇ · A, which represents how A "flows" outward from a given point. As discussed above, a B-field line never starts or ends at a point but instead forms a complete loop. This is mathematically equivalent to saying that the divergence of B is zero. (Such vector fields are called solenoidal vector fields.) This property is called Gauss's law for magnetism and is equivalent to the statement that there are no isolated magnetic poles or magnetic monopoles.
The second mathematical property is called the curl, such that ∇ × A represents how A curls or "circulates" around a given point. The result of the curl is called a "circulation source". The equations for the curl of B and of E are called the Ampère–Maxwell equation and Faraday's law respectively.
One important property of the B-field produced this way is that magnetic B-field lines neither start nor end (mathematically, B is a solenoidal vector field); a field line may only extend to infinity, or wrap around to form a closed curve, or follow a never-ending (possibly chaotic) path.[29] Magnetic field lines exit a magnet near its north pole and enter near its south pole, but inside the magnet B-field lines continue through the magnet from the south pole back to the north.[note 16] If a B-field line enters a magnet somewhere it has to leave somewhere else; it is not allowed to have an end point.
More formally, since all the magnetic field lines that enter any given region must also leave that region, subtracting the "number"[note 17] of field lines that enter the region from the number that exit gives identically zero. Mathematically this is equivalent to Gauss's law for magnetism: where the integral is a surface integral over the closed surfaceS (a closed surface is one that completely surrounds a region with no holes to let any field lines escape). Since dA points outward, the dot product in the integral is positive for B-field pointing out and negative for B-field pointing in.
A changing magnetic field, such as a magnet moving through a conducting coil, generates an electric field (and therefore tends to drive a current in such a coil). This is known as Faraday's law and forms the basis of many electrical generators and electric motors. Mathematically, Faraday's law is:
where is the electromotive force (or EMF, the voltage generated around a closed loop) and Φ is the magnetic flux—the product of the area times the magnetic field normal to that area. (This definition of magnetic flux is why B is often referred to as magnetic flux density.)[30]:210 The negative sign represents the fact that any current generated by a changing magnetic field in a coil produces a magnetic field that opposes the change in the magnetic field that induced it. This phenomenon is known as Lenz's law. This integral formulation of Faraday's law can be converted[note 18] into a differential form, which applies under slightly different conditions.
Similar to the way that a changing magnetic field generates an electric field, a changing electric field generates a magnetic field. This fact is known as Maxwell's correction to Ampère's law and is applied as an additive term to Ampere's law as given above. This additional term is proportional to the time rate of change of the electric flux and is similar to Faraday's law above but with a different and positive constant out front. (The electric flux through an area is proportional to the area times the perpendicular part of the electric field.)
The full law including the correction term is known as the Maxwell–Ampère equation. It is not commonly given in integral form because the effect is so small that it can typically be ignored in most cases where the integral form is used.
The Maxwell term is critically important in the creation and propagation of electromagnetic waves. Maxwell's correction to Ampère's Law together with Faraday's law of induction describes how mutually changing electric and magnetic fields interact to sustain each other and thus to form electromagnetic waves, such as light: a changing electric field generates a changing magnetic field, which generates a changing electric field again. These, though, are usually described using the differential form of this equation given below.
As discussed above, materials respond to an applied electric E field and an applied magnetic B field by producing their own internal "bound" charge and current distributions that contribute to E and B but are difficult to calculate. To circumvent this problem, H and D fields are used to re-factor Maxwell's equations in terms of the free current densityJf:
These equations are not any more general than the original equations (if the "bound" charges and currents in the material are known). They also must be supplemented by the relationship between B and H as well as that between E and D. On the other hand, for simple relationships between these quantities this form of Maxwell's equations can circumvent the need to calculate the bound charges and currents.
Formulation in special relativity and quantum electrodynamics
According to the special theory of relativity, the partition of the electromagnetic force into separate electric and magnetic components is not fundamental, but varies with the observational frame of reference: An electric force perceived by one observer may be perceived by another (in a different frame of reference) as a magnetic force, or a mixture of electric and magnetic forces.
The magnetic field existing as electric field in other frames can be shown by consistency of equations obtained from Lorentz transformation of four force from Coulomb's Law in particle's rest frame with Maxwell's laws considering definition of fields from Lorentz force and for non accelerating condition. The form of magnetic field hence obtained by Lorentz transformation of four-force from the form of Coulomb's law in source's initial frame is given by:[31]:29–42
where is the charge of the point source, is the vacuum permittivity, is the position vector from the point source to the point in space, is the velocity vector of the charged particle, is the ratio of speed of the charged particle divided by the speed of light and is the angle between and . This form of magnetic field can be shown to satisfy Maxwell's laws within the constraint of particle being non accelerating.[32] The above reduces to Biot-Savart law for non relativistic stream of current ().
The vector potential, A given by this form may be interpreted as a generalized potential momentum per unit charge[34] just as φ is interpreted as a generalized potential energy per unit charge. There are multiple choices one can make for the potential fields that satisfy the above condition. However, the choice of potentials is represented by its respective gauge condition.
Maxwell's equations when expressed in terms of the potentials in Lorenz gauge can be cast into a form that agrees with special relativity.[35] In relativity, A together with φ forms a four-potential regardless of the gauge condition, analogous to the four-momentum that combines the momentum and energy of a particle. Using the four potential instead of the electromagnetic tensor has the advantage of being much simpler—and it can be easily modified to work with quantum mechanics.
Propagation of Electric and Magnetic fields
Special theory of relativity imposes the condition for events related by cause and effect to be time-like separated, that is that causal efficacy propagates no faster than light.[36]Maxwell's equations for electromagnetism are found to be in favor of this as electric and magnetic disturbances are found to travel at the speed of light in space. Electric and magnetic fields from classical electrodynamics obey the principle of locality in physics and are expressed in terms of retarded time or the time at which the cause of a measured field originated given that the influence of field travelled at speed of light. The retarded time for a point particle is given as solution of:
where is retarded time or the time at which the source's contribution of the field originated, is the position vector of the particle as function of time, is the point in space, is the time at which fields are measured and is the speed of light. The equation subtracts the time taken for light to travel from particle to the point in space from the time of measurement to find time of origin of the fields. The uniqueness of solution for for given , and is valid for charged particles moving slower than speed of light.[31]
The solution of maxwell's equations for electric and magnetic field of a point charge is expressed in terms of retarded time or the time at which the particle in the past causes the field at the point, given that the influence travels across space at the speed of light.
Any arbitrary motion of point charge causes electric and magnetic fields found by solving maxwell's equations using green's function for retarded potentials and hence finding the fields to be as follows:
where and are electric scalar potential and magnetic vector potential in Lorentz gauge, is the charge of the point source, is a unit vector pointing from charged particle to the point in space, is the velocity of the particle divided by the speed of light and is the corresponding Lorentz factor. Hence by the principle of superposition, the fields of a system of charges also obey principle of locality.
The classical electromagnetic field incorporated into quantum mechanics forms what is known as the semi-classical theory of radiation. However, it is not able to make experimentally observed predictions such as spontaneous emission process or Lamb shift implying the need for quantization of fields. In modern physics, the electromagnetic field is understood to be not a classicalfield, but rather a quantum field; it is represented not as a vector of three numbers at each point, but as a vector of three quantum operators at each point. The most accurate modern description of the electromagnetic interaction (and much else) is quantum electrodynamics (QED),[37] which is incorporated into a more complete theory known as the Standard Model of particle physics.
In QED, the magnitude of the electromagnetic interactions between charged particles (and their antiparticles) is computed using perturbation theory. These rather complex formulas produce a remarkable pictorial representation as Feynman diagrams in which virtual photons are exchanged.
Predictions of QED agree with experiments to an extremely high degree of accuracy: currently about 10−12 (and limited by experimental errors); for details see precision tests of QED. This makes QED one of the most accurate physical theories constructed thus far.
All equations in this article are in the classical approximation, which is less accurate than the quantum description mentioned here. However, under most everyday circumstances, the difference between the two theories is negligible.
A sketch of Earth's magnetic field representing the source of the field as a magnet. The south pole of the magnetic field is near the geographic north pole of the Earth.
The Earth's magnetic field is produced by convection of a liquid iron alloy in the outer core. In a dynamo process, the movements drive a feedback process in which electric currents create electric and magnetic fields that in turn act on the currents.[38]
The field at the surface of the Earth is approximately the same as if a giant bar magnet were positioned at the center of the Earth and tilted at an angle of about 11° off the rotational axis of the Earth (see the figure).[39] The north pole of a magnetic compass needle points roughly north, toward the North Magnetic Pole. However, because a magnetic pole is attracted to its opposite, the North Magnetic Pole is actually the south pole of the geomagnetic field. This confusion in terminology arises because the pole of a magnet is defined by the geographical direction it points.[40]
Earth's magnetic field is not constant—the strength of the field and the location of its poles vary.[41] Moreover, the poles periodically reverse their orientation in a process called geomagnetic reversal. The most recent reversal occurred 780,000 years ago.[42]
The rotating magnetic field is a common design principle in the operation of alternating-current motors. A permanent magnet in such a field rotates so as to maintain its alignment with the external field.
Magnetic torque is used to drive electric motors. In one simple motor design, a magnet is fixed to a freely rotating shaft and is subjected to a magnetic field from an array of electromagnets. By continuously switching the electric current through each of the electromagnets, thereby flipping the polarity of their magnetic fields, like poles are kept next to the rotor; the resultant torque is transferred to the shaft.
A rotating magnetic field can be constructed using two coils at right angles with a phase difference of 90 degrees between their AC currents. In practice, three-phase systems are used where the three currents are equal in magnitude and have a phase difference of 120 degrees. Three similar coils at mutual geometrical angles of 120 degrees create the rotating magnetic field. The ability of the three-phase system to create a rotating field, utilized in electric motors, is one of the main reasons why three-phase systems dominate the world's electrical power supply systems.
Synchronous motors use DC-voltage-fed rotor windings, which lets the excitation of the machine be controlled—and induction motors use short-circuited rotors (instead of a magnet) following the rotating magnetic field of a multicoiled stator. The short-circuited turns of the rotor develop eddy currents induced by the rotating field of the stator, and these currents in turn produce a torque on the rotor through the Lorentz force.
The Italian physicist Galileo Ferraris and the Serbian-American electrical engineerNikola Tesla independently researched the use of rotating magnetic fields in electric motors. In 1888, Ferraris published his research in a paper to the Royal Academy of Sciences in Turin and Tesla gained U.S. patent 381,968 for his work.
The charge carriers of a current-carrying conductor placed in a transverse magnetic field experience a sideways Lorentz force; this results in a charge separation in a direction perpendicular to the current and to the magnetic field. The resultant voltage in that direction is proportional to the applied magnetic field. This is known as the Hall effect.
The Hall effect is often used to measure the magnitude of a magnetic field. It is used as well to find the sign of the dominant charge carriers in materials such as semiconductors (negative electrons or positive holes).
An important use of H is in magnetic circuits where B = μH inside a linear material. Here, μ is the magnetic permeability of the material. This result is similar in form to Ohm's lawJ = σE, where J is the current density, σ is the conductance and E is the electric field. Extending this analogy, the counterpart to the macroscopic Ohm's law (I = V⁄R) is:
where is the magnetic flux in the circuit, is the magnetomotive force applied to the circuit, and Rm is the reluctance of the circuit. Here the reluctance Rm is a quantity similar in nature to resistance for the flux. Using this analogy it is straightforward to calculate the magnetic flux of complicated magnetic field geometries, by using all the available techniques of circuit theory.
Largest magnitude magnetic fields
This section needs to be updated. Please help update this article to reflect recent events or newly available information. Last update: October 2018(July 2021)
As of October 2018[update], the largest magnitude magnetic field produced over a macroscopic volume outside a lab setting is 2.8kT (VNIIEF in Sarov, Russia, 1998).[43][44] As of October 2018, the largest magnitude magnetic field produced in a laboratory over a macroscopic volume was 1.2kT by researchers at the University of Tokyo in 2018.[44] The largest magnitude magnetic fields produced in a laboratory occur in particle accelerators, such as RHIC, inside the collisions of heavy ions, where microscopic fields reach 1014T.[45][46]Magnetars have the strongest known magnetic fields of any naturally occurring object, ranging from 0.1 to 100GT (108 to 1011T).[47]
Common formulæ
Current configuration
Figure
Magnetic field
Finite beam of current
where is the uniform current throughout the beam, with the direction of magnetic field as shown.
Infinite wire
where is the uniform current flowing through the wire with the direction of magnetic field as shown.
Infinite cylindrical wire
outside the wire carrying a current uniformly, with the direction of magnetic field as shown.
inside the wire carrying a current uniformly, with the direction of magnetic field as shown.
Circular loop
along the axis of the loop, where is the uniform current flowing through the loop.
Solenoid
along the axis of the solenoid carrying current with , uniform number of loops of currents per length of solenoid; and the direction of magnetic field as shown.
Infinite solenoid
outside the solenoid carrying current with , uniform number of loops of currents per length of solenoid.
inside the solenoid carrying current with , uniform number of loops of currents per length of solenoid, with the direction of magnetic field as shown.
Circular Toroid
along the bulk of the circular toroid carrying uniform current through number of uniformly distributed poloidal loops, with the direction of magnetic field as indicated.
on the axial plane (given that ), where can also be negative to indicate position at the opposite direction on the axis, and is the magnetic dipole moment.
Additional magnetic field values can be found through the magnetic field of a finite beam, for example, that the magnetic field of an arc of angle and radius at the center is , or that the magnetic field at the center of a N-sided regular polygon of side is , both outside of the plane with proper directions as inferred by right hand thumb rule.
One of the first drawings of a magnetic field, by René Descartes, 1644, showing the Earth attracting lodestones. It illustrated his theory that magnetism was caused by the circulation of tiny helical particles, "threaded parts", through threaded pores in magnets.
Early developments
While magnets and some properties of magnetism were known to ancient societies, the research of magnetic fields began in 1269 when French scholar Petrus Peregrinus de Maricourt mapped out the magnetic field on the surface of a spherical magnet using iron needles. Noting the resulting field lines crossed at two points he named those points "poles" in analogy to Earth's poles. He also articulated the principle that magnets always have both a north and south pole, no matter how finely one slices them.[48][note 19]
Almost three centuries later, William Gilbert of Colchester replicated Petrus Peregrinus' work and was the first to state explicitly that Earth is a magnet.[49]:34 Published in 1600, Gilbert's work, De Magnete, helped to establish magnetism as a science.
In 1750, John Michell stated that magnetic poles attract and repel in accordance with an inverse square law[49]:56Charles-Augustin de Coulomb experimentally verified this in 1785 and stated explicitly that north and south poles cannot be separated.[49]:59 Building on this force between poles, Siméon Denis Poisson (1781–1840) created the first successful model of the magnetic field, which he presented in 1824.[49]:64 In this model, a magnetic H-field is produced by magnetic poles and magnetism is due to small pairs of north–south magnetic poles.
Three discoveries in 1820 challenged this foundation of magnetism. Hans Christian Ørsted demonstrated that a current-carrying wire is surrounded by a circular magnetic field.[note 20][50] Then André-Marie Ampère showed that parallel wires with currents attract one another if the currents are in the same direction and repel if they are in opposite directions.[49]:87[51] Finally, Jean-Baptiste Biot and Félix Savart announced empirical results about the forces that a current-carrying long, straight wire exerted on a small magnet, determining the forces were inversely proportional to the perpendicular distance from the wire to the magnet.[52][49]:86Laplace later deduced a law of force based on the differential action of a differential section of the wire,[52][53] which became known as the Biot–Savart law, as Laplace did not publish his findings.[54]
Extending these experiments, Ampère published his own successful model of magnetism in 1825. In it, he showed the equivalence of electrical currents to magnets[49]:88 and proposed that magnetism is due to perpetually flowing loops of current instead of the dipoles of magnetic charge in Poisson's model.[note 21] Further, Ampère derived both Ampère's force law describing the force between two currents and Ampère's law, which, like the Biot–Savart law, correctly described the magnetic field generated by a steady current. Also in this work, Ampère introduced the term electrodynamics to describe the relationship between electricity and magnetism.[49]:88–92
In 1831, Michael Faraday discovered electromagnetic induction when he found that a changing magnetic field generates an encircling electric field, formulating what is now known as Faraday's law of induction.[49]:189–192 Later, Franz Ernst Neumann proved that, for a moving conductor in a magnetic field, induction is a consequence of Ampère's force law.[49]:222 In the process, he introduced the magnetic vector potential, which was later shown to be equivalent to the underlying mechanism proposed by Faraday.[49]:225
In 1850, Lord Kelvin, then known as William Thomson, distinguished between two magnetic fields now denoted H and B. The former applied to Poisson's model and the latter to Ampère's model and induction.[49]:224 Further, he derived how H and B relate to each other and coined the term permeability.[49]:245[55]
In 1887, Tesla developed an induction motor that ran on alternating current. The motor used polyphase current, which generated a rotating magnetic field to turn the motor (a principle that Tesla claimed to have conceived in 1882).[58][59][60] Tesla received a patent for his electric motor in May 1888.[61][62] In 1885, Galileo Ferraris independently researched rotating magnetic fields and subsequently published his research in a paper to the Royal Academy of Sciences in Turin, just two months before Tesla was awarded his patent, in March 1888.[63]
The twentieth century showed that classical electrodynamics is already consistent with special relativity, and extended classical electrodynamics to work with quantum mechanics. Albert Einstein, in his paper of 1905 that established relativity, showed that both the electric and magnetic fields are part of the same phenomena viewed from different reference frames. Finally, the emergent field of quantum mechanics was merged with electrodynamics to form quantum electrodynamics, which first formalized the notion that electromagnetic field energy is quantized in the form of photons.
See also
General
Magnetohydrodynamics– the study of the dynamics of electrically conducting fluids
Teltron tube– device used to display an electron beam and demonstrates effect of electric and magnetic fields on moving charges
Notes
↑More precisely, magnetic field is a pseudovector field due to its properties under inversion.
↑The letters B and H were originally chosen by Maxwell in his Treatise on Electricity and Magnetism (Vol. II, pp. 236–237). For many quantities, he simply started choosing letters from the beginning of the alphabet. See Ralph Baierlein (2000). "Answer to Question #73. S is for entropy, Q is for charge". American Journal of Physics. 68 (8): 691. Bibcode:2000AmJPh..68..691B. doi:10.1119/1.19524.
↑Edward Purcell, in Electricity and Magnetism, McGraw-Hill, 1963, writes, Even some modern writers who treat B as the primary field feel obliged to call it the magnetic induction because the name magnetic field was historically preempted by H. This seems clumsy and pedantic. If you go into the laboratory and ask a physicist what causes the pion trajectories in his bubble chamber to curve, he'll probably answer "magnetic field", not "magnetic induction." You will seldom hear a geophysicist refer to the Earth's magnetic induction, or an astrophysicist talk about the magnetic induction of the galaxy. We propose to keep on calling B the magnetic field. As for H, although other names have been invented for it, we shall call it "the field H" or even "the magnetic field H." In a similar vein, M Gerloch (1983). Magnetism and Ligand-field Analysis. Cambridge University Press. p.110. ISBN978-0-521-24939-3. says: "So we may think of both B and H as magnetic fields, but drop the word 'magnetic' from H so as to maintain the distinction ... As Purcell points out, 'it is only the names that give trouble, not the symbols'."
↑The SI unit of ΦB (magnetic flux) is the weber (symbol: Wb), related to the tesla by 1Wb/m2 = 1T. The SI unit tesla is equal to (newton·second)/(coulomb·metre). This can be seen from the magnetic part of the Lorentz force law.
↑Griffiths 1999, p.272"As it turns out, H is a more useful quantity than D. ... The reason is this: To build an electromagnet you run a certain (free) current through a coil. The current is the thing you read on the dial, and this determines H (or at any rate, the line integral of H)."
↑This component of the H-field is called the demagnetizing field and can be calculated separate from the part due to the current
↑for certain high-symmetry cases where Ampere's law can easily used
↑This occurs when the quantity of interest is a line integral (over a loop) of the H-field such as in the MMF of magnetic circuits.
↑The use of iron filings to display a field presents something of an exception to this picture; the filings alter the magnetic field so that it is much larger along the "lines" of iron, because of the large permeability of iron relative to air.
↑Here, "small" means that the observer is sufficiently far away from the magnet, so that the magnet can be considered as infinitesimally small. "Larger" magnets need to include more complicated terms in the mathematical expression of the magnetic field and depend on the entire geometry of the magnet not just m.
↑Either B or H may be used for the magnetic field outside the magnet.
↑In practice, the Biot–Savart law and other laws of magnetostatics are often used even when a current change in time, as long as it does not change too quickly. It is often used, for instance, for standard household currents, which oscillate sixty times per second.[16]:223
↑ The Biot–Savart law contains the additional restriction (boundary condition) that the B-field must go to zero fast enough at infinity. It also depends on the divergence of B being zero, which is always valid. (There are no magnetic charges.)
↑A third term is needed for changing electric fields and polarization currents; this displacement current term is covered in Maxwell's equations below.
↑To see that this must be true imagine placing a compass inside a magnet. There, the north pole of the compass points toward the north pole of the magnet since magnets stacked on each other point in the same direction.
↑As discussed above, magnetic field lines are primarily a conceptual tool used to represent the mathematics behind magnetic fields. The total "number" of field lines is dependent on how the field lines are drawn. In practice, integral equations such as the one that follows in the main text are used instead.
↑ A complete expression for Faraday's law of induction in terms of the electric E and magnetic fields can be written as: where ∂Σ(t) is the moving closed path bounding the moving surface Σ(t), and dA is an element of surface area of Σ(t). The first integral calculates the work done moving a charge a distance dℓ based upon the Lorentz force law. In the case where the bounding surface is stationary, the Kelvin–Stokes theorem can be used to show this equation is equivalent to the Maxwell–Faraday equation.
↑His Epistola Petri Peregrini de Maricourt ad Sygerum de Foucaucourt Militem de Magnete, which is often shortened to Epistola de magnete, is dated 1269 C.E.
↑During a lecture demonstration on the effects of a current on a campus needle, Ørsted showed that when a current-carrying wire is placed at a right angle with the compass, nothing happens. When he tried to orient the wire parallel to the compass needle, however, it produced a pronounced deflection of the compass needle. By placing the compass on different sides of the wire, he was able to determine the field forms perfect circles around the wire.[49]:85
↑From the outside, the field of a dipole of magnetic charge has exactly the same form as a current loop when both are sufficiently small. Therefore, the two models differ only for magnetism inside magnetic material.
References
↑John J. Roche (2000). "B and H, the intensity vectors of magnetism: A new approach to resolving a century-old controversy". American Journal of Physics. 68 (5): 438. Bibcode:2000AmJPh..68..438R. doi:10.1119/1.19459.
12Stratton, Julius Adams (1941). Electromagnetic Theory (1sted.). McGraw-Hill. p.1. ISBN978-0-07-062150-3.{{cite book}}: ISBN / Date incompatibility (help)
↑Feynman, Richard P.; Leighton, Robert B.; Sands, Matthew (1963). The Feynman Lectures on Physics. Vol.2. California Institute of Technology.
↑"International system of units (SI)". NIST reference on constants, units, and uncertainty. National Institute of Standards and Technology. 12 April 2010. Retrieved 9 May 2012.
↑John Clarke Slater; Nathaniel Herman Frank (1969). Electromagnetism (first published in 1947ed.). Courier Dover Publications. p.69. ISBN978-0-486-62263-7.
↑Naber, Gregory L. (2012). The Geometry of Minkowski spacetime: an introduction to the mathematics of the special theory of relativity. Springer. pp.4–5. ISBN978-1-4419-7837-0. OCLC804823303.
↑"What is the Earth's magnetic field?". Geomagnetism Frequently Asked Questions. National Centers for Environmental Information, National Oceanic and Atmospheric Administration. Retrieved 19 April 2018.
↑Merrill, Ronald T.; McElhinny, Michael W.; McFadden, Phillip L. (1996). "2. The present geomagnetic field: analysis and description from historical observations". The magnetic field of the earth: paleomagnetism, the core, and the deep mantle. Academic Press. ISBN978-0-12-491246-5.
↑Boyko, B.A.; Bykov, A.I.; Dolotenko, M.I.; Kolokolchikov, N.P.; Markevtsev, I.M.; Tatsenko, O.M.; Shuvalov, K. (1999). "With record magnetic fields to the 21st Century". Digest of Technical Papers. 12th IEEE International Pulsed Power Conference. (Cat. No.99CH36358). Vol.2. pp.746–749. doi:10.1109/PPC.1999.823621. ISBN0-7803-5498-2. S2CID42588549.
↑Williams, L. Pearce (1974). "Oersted, Hans Christian". In Gillespie, C. C. (ed.). Dictionary of Scientific Biography. New York: Charles Scribner's Sons. p.185.
↑Blundell, Stephen J. (2012). Magnetism: A Very Short Introduction. OUP Oxford. p.31. ISBN978-0-19-163372-0.
↑Frankel, Eugene (1972). Jean-Baptiste Biot: The career of a physicist in nineteenth-century France. Princeton University: Doctoral dissertation. p.334.
Jiles, David (1994). Introduction to Electronic Properties of Materials (1sted.). Springer. ISBN978-0-412-49580-9.
Tipler, Paul (2004). Physics for Scientists and Engineers: Electricity, Magnetism, Light, and Elementary Modern Physics (5th ed.). W. H. Freeman. ISBN978-0-7167-0810-0. OCLC51095685.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.