
The RGB color model is an additive color model in which the red, green and blue primary colors of light are added together in various ways to reproduce a broad array of colors. The name of the model comes from the initials of the three additive primary colors, red, green, and blue.

A set of primary colors or primary colours consists of colorants or colored lights that can be mixed in varying amounts to produce a gamut of colors. This is the essential method used to create the perception of a broad range of colors in, e.g., electronic displays, color printing, and paintings. Perceptions associated with a given combination of primary colors can be predicted by an appropriate mixing model that reflects the physics of how light interacts with physical media, and ultimately the retina.

In color theory, hue is one of the main properties of a color, defined technically in the CIECAM02 model as "the degree to which a stimulus can be described as similar to or different from stimuli that are described as red, orange, yellow, green, blue, violet," within certain theories of color vision.

An RGB color space is any additive color space based on the RGB color model.

HSL and HSV are alternative representations of the RGB color model, designed in the 1970s by computer graphics researchers. In these models, colors of each hue are arranged in a radial slice, around a central axis of neutral colors which ranges from black at the bottom to white at the top.
In digital photography, computer-generated imagery, and colorimetry, a grayscale image is one in which the value of each pixel is a single sample representing only an amount of light; that is, it carries only intensity information. Grayscale images, a kind of black-and-white or gray monochrome, are composed exclusively of shades of gray. The contrast ranges from black at the weakest intensity to white at the strongest.
In image processing and photography, a color histogram is a representation of the distribution of colors in an image. For digital images, a color histogram represents the number of pixels that have colors in each of a fixed list of color ranges, that span the image's color space, the set of all possible colors.

sRGB is a standard RGB color space that HP and Microsoft created cooperatively in 1996 to use on monitors, printers, and the World Wide Web. It was subsequently standardized by the International Electrotechnical Commission (IEC) as IEC 61966-2-1:1999. sRGB is the current defined standard colorspace for the web, and it is usually the assumed colorspace for images that are neither tagged for a colorspace nor have an embedded color profile.
The Adobe RGB (1998) color space or opRGB is a color space developed by Adobe Inc. in 1998. It was designed to encompass most of the colors achievable on CMYK color printers, but by using RGB primary colors on a device such as a computer display. The Adobe RGB (1998) color space encompasses roughly 50% of the visible colors specified by the CIELAB color space – improving upon the gamut of the sRGB color space, primarily in cyan-green hues. It was subsequently standardized by the IEC as IEC 61966-2-5:1999 with a name opRGB and is used in HDMI.

In photography and image processing, color balance is the global adjustment of the intensities of the colors. An important goal of this adjustment is to render specific colors – particularly neutral colors like white or grey – correctly. Hence, the general method is sometimes called gray balance, neutral balance, or white balance. Color balance changes the overall mixture of colors in an image and is used for color correction. Generalized versions of color balance are used to correct colors other than neutrals or to deliberately change them for effect. White balance is one of the most common kinds of balancing, and is when colors are adjusted to make a white object appear white and not a shade of any other colour.
A color model is an abstract mathematical model describing the way colors can be represented as tuples of numbers, typically as three or four values or color components. When this model is associated with a precise description of how the components are to be interpreted, taking account of visual perception, the resulting set of colors is called "color space."

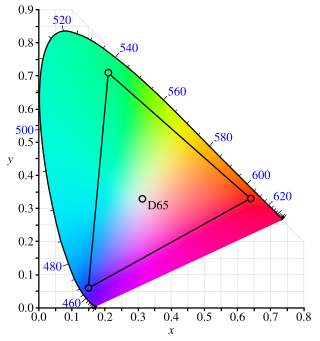
The CIE 1931 color spaces are the first defined quantitative links between distributions of wavelengths in the electromagnetic visible spectrum, and physiologically perceived colors in human color vision. The mathematical relationships that define these color spaces are essential tools for color management, important when dealing with color inks, illuminated displays, and recording devices such as digital cameras. The system was designed in 1931 by the "Commission Internationale de l'éclairage", known in English as the International Commission on Illumination.
The Standard Reference Method or SRM is one of several systems modern brewers use to specify beer color. Determination of the SRM value involves measuring the attenuation of light of a particular wavelength (430 nm) in passing through 1 cm of the beer, expressing the attenuation as an absorption and scaling the absorption by a constant.

LMS, is a color space which represents the response of the three types of cones of the human eye, named for their responsivity (sensitivity) peaks at long, medium, and short wavelengths.
Relative luminance follows the photometric definition of luminance including spectral weighting for human vision, but while luminance is a measure of light in units such as , Relative luminance values are normalized as 0.0 to 1.0, with 1.0 being a theoretical perfect reflector of 100% reference white. Like the photometric definition, it is related to the luminous flux density in a particular direction, which is radiant flux density weighted by the luminous efficiency function y(λ) of the CIE Standard Observer.

A standard illuminant is a theoretical source of visible light with a spectral power distribution that is published. Standard illuminants provide a basis for comparing images or colors recorded under different lighting.
Adams chromatic valence color spaces are a class of color spaces suggested by Elliot Quincy Adams. Two important Adams chromatic valence spaces are CIELUV and Hunter Lab.
Grassmann's laws describe empirical results about how the perception of mixtures of colored lights composed of different spectral power distributions can be algebraically related to one another in a color matching context. Discovered by Hermann Grassmann these "laws" are actually principles used to predict color match responses to a good approximation under photopic and mesopic vision. A number of studies have examined how and why they provide poor predictions under specific conditions.

The CIE 1960 color space ("CIE 1960 UCS", variously expanded Uniform Color Space, Uniform Color Scale, Uniform Chromaticity Scale, Uniform Chromaticity Space) is another name for the (u, v) chromaticity space devised by David MacAdam.
In colorimetry the OSA-UCS is a color space first published in 1947 and developed by the Optical Society of America’s Committee on Uniform Color Scales. Previously created color order systems, such as the Munsell color system, failed to represent perceptual uniformity in all directions. The committee decided that, in order to accurately represent uniform color differences in each direction, a new shape of three dimensional Cartesian geometry would need to be used.


























