The simplest construction is as the image of a sphere centered at the origin under the map This gives an implicit formula of
Also, taking a parametrization of the sphere in terms of longitude (θ) and latitude (φ), gives parametric equations for the Roman surface as follows:
The origin is a triple point, and each of the xy-, yz-, and xz-planes are tangential to the surface there. The other places of self-intersection are double points, defining segments along each coordinate axis which terminate in six pinch points. The entire surface has tetrahedralsymmetry. It is a particular type (called type 1) of Steiner surface, that is, a 3-dimensional linear projection of the Veronese surface.
Derivation of implicit formula
For simplicity we consider only the case r = 1. Given the sphere defined by the points (x, y, z) such that
we apply to these points the transformation T defined by say.
But then we have
and so as desired.
Conversely, suppose we are given (U, V, W) satisfying
(*)
We prove that there exists (x,y,z) such that
(**)
for which
with one exception: In case 3.b. below, we show this cannot be proved.
1. In the case where none of U, V, W is 0, we can set
(Note that (*) guarantees that either all three of U, V, W are positive, or else exactly two are negative. So these square roots are of positive numbers.)
It is easy to use (*) to confirm that (**) holds for x, y, z defined this way.
2. Suppose that W is 0. From (*) this implies
and hence at least one of U, V must be 0 also. This shows that is it impossible for exactly one of U, V, W to be 0.
(since implies that and hence contradicting (***).)
a. In the subcase where
if we determine x and y by
and
this ensures that (*) holds. It is easy to verify that
and hence choosing the signs of x and y appropriately will guarantee
Since also
this shows that this subcase leads to the desired converse.
b. In this remaining subcase of the case 3., we have
Since
it is easy to check that
and thus in this case, where
there is no (x, y, z) satisfying
Hence the solutions (U, 0, 0) of the equation (*) with
and likewise, (0, V, 0) with
and (0, 0, W) with
(each of which is a noncompact portion of a coordinate axis, in two pieces) do not correspond to any point on the Roman surface.
4. If (U, V, W) is the point (0, 0, 0), then if any two of x, y, z are zero and the third one has absolute value 1, clearly as desired.
This covers all possible cases.
Derivation of parametric equations
Let a sphere have radius r, longitude φ, and latitude θ. Then its parametric equations are
Then, applying transformation T to all the points on this sphere yields
which are the points on the Roman surface. Let φ range from 0 to 2π, and let θ range from 0 to π/2.
Relation to the real projective plane
The sphere, before being transformed, is not homeomorphic to the real projective plane, RP2. But the sphere centered at the origin has this property, that if point (x,y,z) belongs to the sphere, then so does the antipodal point (-x,-y,-z) and these two points are different: they lie on opposite sides of the center of the sphere.
The transformation T converts both of these antipodal points into the same point,
Since this is true of all points of S2, then it is clear that the Roman surface is a continuous image of a "sphere modulo antipodes". Because some distinct pairs of antipodes are all taken to identical points in the Roman surface, it is not homeomorphic to RP2, but is instead a quotient of the real projective plane RP2 = S2 / (x~-x). Furthermore, the map T (above) from S2 to this quotient has the special property that it is locally injective away from six pairs of antipodal points. Or from RP2 the resulting map making this an immersion of RP2 — minus six points — into 3-space.
Structure of the Roman surface
The Roman surface has four bulbous "lobes", each one on a different corner of a tetrahedron.
A Roman surface can be constructed by splicing together three hyperbolic paraboloids and then smoothing out the edges as necessary so that it will fit a desired shape (e.g. parametrization).
Let there be these three hyperbolic paraboloids:
x = yz,
y = zx,
z = xy.
These three hyperbolic paraboloids intersect externally along the six edges of a tetrahedron and internally along the three axes. The internal intersections are loci of double points. The three loci of double points: x = 0, y = 0, and z = 0, intersect at a triple point at the origin.
For example, given x = yz and y = zx, the second paraboloid is equivalent to x = y/z. Then
and either y = 0 or z2 = 1 so that z = ±1. Their two external intersections are
x = y, z = 1;
x = −y, z = −1.
Likewise, the other external intersections are
x = z, y = 1;
x = −z, y = −1;
y = z, x = 1;
y = −z, x = −1.
Let us see the pieces being put together. Join the paraboloids y = xz and x = yz. The result is shown in Figure 1.
Figure 1.
The paraboloid y = x z is shown in blue and orange. The paraboloid x = y z is shown in cyan and purple. In the image the paraboloids are seen to intersect along the z = 0 axis. If the paraboloids are extended, they should also be seen to intersect along the lines
z = 1, y = x;
z = −1, y = −x.
The two paraboloids together look like a pair of orchids joined back-to-back.
Now run the third hyperbolic paraboloid, z = xy, through them. The result is shown in Figure 2.
Figure 2.
On the west-southwest and east-northeast directions in Figure 2 there are a pair of openings. These openings are lobes and need to be closed up. When the openings are closed up, the result is the Roman surface shown in Figure 3.
Figure 3. Roman surface.
A pair of lobes can be seen in the West and East directions of Figure 3. Another pair of lobes are hidden underneath the third (z = xy) paraboloid and lie in the North and South directions.
If the three intersecting hyperbolic paraboloids are drawn far enough that they intersect along the edges of a tetrahedron, then the result is as shown in Figure 4.
Figure 4.
One of the lobes is seen frontally—head on—in Figure 4. The lobe can be seen to be one of the four corners of the tetrahedron.
If the continuous surface in Figure 4 has its sharp edges rounded out—smoothed out—then the result is the Roman surface in Figure 5.
One of the lobes of the Roman surface is seen frontally in Figure 5, and its bulbous – balloon-like—shape is evident.
If the surface in Figure 5 is turned around 180 degrees and then turned upside down, the result is as shown in Figure 6.
Figure 6. Roman surface.
Figure 6 shows three lobes seen sideways. Between each pair of lobes there is a locus of double points corresponding to a coordinate axis. The three loci intersect at a triple point at the origin. The fourth lobe is hidden and points in the direction directly opposite from the viewer. The Roman surface shown at the top of this article also has three lobes in sideways view.
One-sidedness
The Roman surface is non-orientable, i.e. one-sided. This is not quite obvious. To see this, look again at Figure 3.
Imagine an ant on top of the "third" hyperbolic paraboloid, z = x y. Let this ant move North. As it moves, it will pass through the other two paraboloids, like a ghost passing through a wall. These other paraboloids only seem like obstacles due to the self-intersecting nature of the immersion. Let the ant ignore all double and triple points and pass right through them. So the ant moves to the North and falls off the edge of the world, so to speak. It now finds itself on the northern lobe, hidden underneath the third paraboloid of Figure 3. The ant is standing upside-down, on the "outside" of the Roman surface.
Let the ant move towards the Southwest. It will climb a slope (upside-down) until it finds itself "inside" the Western lobe. Now let the ant move in a Southeastern direction along the inside of the Western lobe towards the z = 0 axis, always above the x-y plane. As soon as it passes through the z = 0 axis the ant will be on the "outside" of the Eastern lobe, standing rightside-up.
Then let it move Northwards, over "the hill", then towards the Northwest so that it starts sliding down towards the x = 0 axis. As soon as the ant crosses this axis it will find itself "inside" the Northern lobe, standing right side up. Now let the ant walk towards the North. It will climb up the wall, then along the "roof" of the Northern lobe. The ant is back on the third hyperbolic paraboloid, but this time under it and standing upside-down. (Compare with Klein bottle.)
Double, triple, and pinching points
The Roman surface has four "lobes". The boundaries of each lobe are a set of three lines of double points. Between each pair of lobes there is a line of double points. The surface has a total of three lines of double points, which lie (in the parametrization given earlier) on the coordinate axes. The three lines of double points intersect at a triple point which lies on the origin. The triple point cuts the lines of double points into a pair of half-lines, and each half-line lies between a pair of lobes. One might expect from the preceding statements that there could be up to eight lobes, one in each octant of space which has been divided by the coordinate planes. But the lobes occupy alternating octants: four octants are empty and four are occupied by lobes.
If the Roman surface were to be inscribed inside the tetrahedron with least possible volume, one would find that each edge of the tetrahedron is tangent to the Roman surface at a point, and that each of these six points happens to be a Whitney singularity. These singularities, or pinching points, all lie at the edges of the three lines of double points, and they are defined by this property: that there is no plane tangent to any surface at the singularity.
In mathematics, the Klein bottle is an example of a non-orientable surface; that is, informally, a one-sided surface which, if traveled upon, could be followed back to the point of origin while flipping the traveler upside down. More formally, the Klein bottle is a two-dimensional manifold on which one cannot define a normal vector at each point that varies continuously over the whole manifold. Other related non-orientable surfaces include the Möbius strip and the real projective plane. While a Möbius strip is a surface with a boundary, a Klein bottle has no boundary. For comparison, a sphere is an orientable surface with no boundary.
In mathematics, a spherical coordinate system is a coordinate system for three-dimensional space where the position of a given point in space is specified by three numbers, : the radial distance of the radial liner connecting the point to the fixed point of origin ; the polar angle θ of the radial line r; and the azimuthal angle φ of the radial line r.
In mathematics and physics, Laplace's equation is a second-order partial differential equation named after Pierre-Simon Laplace, who first studied its properties. This is often written as
In mathematics, an n-sphere or hypersphere is an n-dimensional generalization of the 1-dimensional circle and 2-dimensional sphere to any non-negative integer n. The n-sphere is the setting for n-dimensional spherical geometry.
An ellipsoid is a surface that can be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
In mathematics, a unit vector in a normed vector space is a vector of length 1. A unit vector is often denoted by a lowercase letter with a circumflex, or "hat", as in .
In mechanics and geometry, the 3D rotation group, often denoted SO(3), is the group of all rotations about the origin of three-dimensional Euclidean space under the operation of composition.
In continuum mechanics, the infinitesimal strain theory is a mathematical approach to the description of the deformation of a solid body in which the displacements of the material particles are assumed to be much smaller than any relevant dimension of the body; so that its geometry and the constitutive properties of the material at each point of space can be assumed to be unchanged by the deformation.
Unit quaternions, known as versors, provide a convenient mathematical notation for representing spatial orientations and rotations of elements in three dimensional space. Specifically, they encode information about an axis-angle rotation about an arbitrary axis. Rotation and orientation quaternions have applications in computer graphics, computer vision, robotics, navigation, molecular dynamics, flight dynamics, orbital mechanics of satellites, and crystallographic texture analysis.
Linear elasticity is a mathematical model of how solid objects deform and become internally stressed due to prescribed loading conditions. It is a simplification of the more general nonlinear theory of elasticity and a branch of continuum mechanics.
In mathematics, Pappus's centroid theorem is either of two related theorems dealing with the surface areas and volumes of surfaces and solids of revolution.
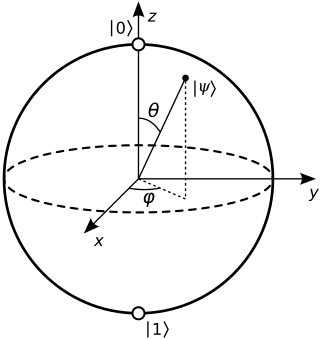
In quantum mechanics and computing, the Bloch sphere is a geometrical representation of the pure state space of a two-level quantum mechanical system (qubit), named after the physicist Felix Bloch.
A cone is a three-dimensional geometric shape that tapers smoothly from a flat base to a point called the apex or vertex.
In linear algebra, a rotation matrix is a transformation matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix
In mathematics, the Cayley transform, named after Arthur Cayley, is any of a cluster of related things. As originally described by Cayley (1846), the Cayley transform is a mapping between skew-symmetric matrices and special orthogonal matrices. The transform is a homography used in real analysis, complex analysis, and quaternionic analysis. In the theory of Hilbert spaces, the Cayley transform is a mapping between linear operators.
In mathematics (specifically multivariable calculus), a multiple integral is a definite integral of a function of several real variables, for instance, f(x, y) or f(x, y, z). Physical (natural philosophy) interpretation: S any surface, V any volume, etc.. Incl. variable to time, position, etc.
In geometry, various formalisms exist to express a rotation in three dimensions as a mathematical transformation. In physics, this concept is applied to classical mechanics where rotational kinematics is the science of quantitative description of a purely rotational motion. The orientation of an object at a given instant is described with the same tools, as it is defined as an imaginary rotation from a reference placement in space, rather than an actually observed rotation from a previous placement in space.
In projective geometry, the circular points at infinity are two special points at infinity in the complex projective plane that are contained in the complexification of every real circle.
In general relativity, a point mass deflects a light ray with impact parameter by an angle approximately equal to
The Mandelbulb is a three-dimensional fractal, constructed for the first time in 1997 by Jules Ruis and in 2009 further developed by Daniel White and Paul Nylander using spherical coordinates.
References
↑ Coffman, Adam. "Steiner Roman Surfaces". National Curve Bank. Indiana University - Purdue University Fort Wayne.
General references
A. Coffman, A. Schwartz, and C. Stanton: The Algebra and Geometry of Steiner and other Quadratically Parametrizable Surfaces. In Computer Aided Geometric Design (3) 13 (April 1996), p.257-286
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.