A set (in light blue) and its boundary (in dark blue).
In topology and mathematics in general, the boundary of a subset S of a topological spaceX is the set of points in the closure of S not belonging to the interior of S. An element of the boundary of S is called a boundary point of S. The term boundary operation refers to finding or taking the boundary of a set. Notations used for boundary of a set S include and .
Some authors (for example, Willard in General Topology) use the term frontier instead of boundary in an attempt to avoid confusion with a different definition used in algebraic topology and the theory of manifolds. Despite widespread acceptance of the meaning of the terms boundary and frontier, they have sometimes been used to refer to other sets. For example, Metric Spaces by E. T. Copson uses the term boundary to refer to Hausdorff's border, which is defined as the intersection of a set with its boundary.[1] Hausdorff also introduced the term residue, which is defined as the intersection of a set with the closure of the border of its complement.[2]
Definitions
There are several equivalent definitions for the boundary of a subset of a topological space which will be denoted by or simply if is understood:
It is the intersection of the closure of with the closure of its complement:
It is the set of points such that every neighborhood of contains at least one point of and at least one point not of :
It is all points in which are not in either the interior or exterior of : where denotes the interior of in and denotes the exterior of in
A boundary point of a set is any element of that set's boundary. The boundary defined above is sometimes called the set's topological boundary to distinguish it from other similarly named notions such as the boundary of a manifold with boundary or the boundary of a manifold with corners, to name just a few examples.
A connected component of the boundary of S is called a boundary component of S.
These last two examples illustrate the fact that the boundary of a dense set with empty interior is its closure. They also show that it is possible for the boundary of a subset to contain a non-empty open subset of ; that is, for the interior of in to be non-empty. However, a closed subset's boundary always has an empty interior.
The notation is used because the boundary of a set crucially depends on the surrounding topological space that's considered. Take for instance the set . Considered as a subset of , its boundary is the closed interval; considered as a subset of (where is given its usual topology, the subspace topology inherited from ), the boundary of is ; and considered as a subset of itself, its boundary is empty.
Given the usual topology on the boundary of a closed disk is the disk's surrounding circle: If the disk is instead viewed as a set in with its own usual topology, that is, then the boundary of the disk is the disk itself:
Properties
The boundary of a set is closed;[3] this follows from the formula which expresses as the intersection of two closed subsets of
A set is closed if and only if it contains its boundary, and open if and only if it is disjoint from its boundary.
The closure of a set equals the union of the set with its boundary: ("Trichotomy") Given any subset each point of lies in exactly one of the three sets and Said differently, and these three sets are pairwise disjoint.
A point is a boundary point of a set if and only if every neighborhood of contains at least one point in the set and at least one point not in the set. The boundary of the interior of a set as well as the boundary of the closure of a set are both contained in the boundary of the set.
A set and its complement have the same boundary: A set is a denseopen subset of if and only if
The interior of the boundary of a closed set is empty.[4] Consequently, the interior of the boundary of the closure of a set is empty. The interior of the boundary of an open set is also empty.[5] Consequently, the interior of the boundary of the interior of a set is empty. In particular, if is a closed or open subset of then there does not exist any nonempty subset such that is open in This fact is important for the definition and use of nowhere dense subsets, meager subsets, and Baire spaces.
A set is the boundary of some open set if and only if it is closed and nowhere dense. The boundary of a set is empty if and only if the set is both closed and open (that is, a clopen set).
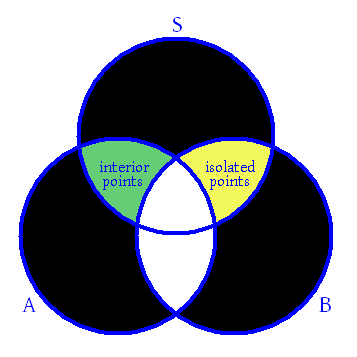
Conceptual Venn diagram showing the relationships among different points of a subset of = set of accumulation points of (also called limit points), set of boundary points of area shaded green = set of interior points of area shaded yellow = set of isolated points of areas shaded black = empty sets. Every point of is either an interior point or a boundary point. Also, every point of is either an accumulation point or an isolated point. Likewise, every boundary point of is either an accumulation point or an isolated point. Isolated points are always boundary points.
Boundary of a boundary
For any set where denotes the superset with equality holding if and only if the boundary of has no interior points, which will be the case for example if is either closed or open. Since the boundary of a set is closed, for any set The boundary operator thus satisfies a weakened kind of idempotence.
In discussing boundaries of manifolds or simplexes and their simplicial complexes, one often meets the assertion that the boundary of the boundary is always empty. Indeed, the construction of the singular homology rests critically on this fact. The explanation for the apparent incongruity is that the topological boundary (the subject of this article) is a slightly different concept from the boundary of a manifold or of a simplicial complex. For example, the boundary of an open disk viewed as a manifold is empty, as is its topological boundary viewed as a subset of itself, while its topological boundary viewed as a subset of the real plane is the circle surrounding the disk. Conversely, the boundary of a closed disk viewed as a manifold is the bounding circle, as is its topological boundary viewed as a subset of the real plane, while its topological boundary viewed as a subset of itself is empty. In particular, the topological boundary depends on the ambient space, while the boundary of a manifold is invariant.
↑Mendelson, Bert (1990) [1975]. Introduction to Topology (Thirded.). Dover. p.86. ISBN0-486-66352-3. Corollary 4.15 For each subset is closed.
↑Let be a closed subset of so that and thus also If is an open subset of such that then (because ) so that (because by definition, is the largest open subset of contained in ). But implies that Thus is simultaneously a subset of and disjoint from which is only possible if Q.E.D.
↑Let be an open subset of so that Let so that which implies that If then pick so that Because is an open neighborhood of in and the definition of the topological closure implies that which is a contradiction. Alternatively, if is open in then is closed in so that by using the general formula and the fact that the interior of the boundary of a closed set (such as ) is empty, it follows that
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.