Related Research Articles
The Internet Control Message Protocol (ICMP) is a supporting protocol in the Internet protocol suite. It is used by network devices, including routers, to send error messages and operational information indicating success or failure when communicating with another IP address, for example, an error is indicated when a requested service is not available or that a host or router could not be reached. ICMP differs from transport protocols such as TCP and UDP in that it is not typically used to exchange data between systems, nor is it regularly employed by end-user network applications.
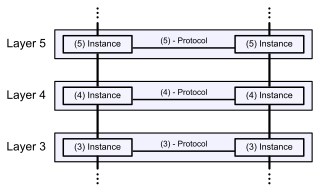
The Open Systems Interconnection model is a reference model from the International Organization for Standardization (ISO) that "provides a common basis for the coordination of standards development for the purpose of systems interconnection." In the OSI reference model, the communications between systems are split into seven different abstraction layers: Physical, Data Link, Network, Transport, Session, Presentation, and Application.
The Transmission Control Protocol (TCP) is one of the main protocols of the Internet protocol suite. It originated in the initial network implementation in which it complemented the Internet Protocol (IP). Therefore, the entire suite is commonly referred to as TCP/IP. TCP provides reliable, ordered, and error-checked delivery of a stream of octets (bytes) between applications running on hosts communicating via an IP network. Major internet applications such as the World Wide Web, email, remote administration, and file transfer rely on TCP, which is part of the Transport layer of the TCP/IP suite. SSL/TLS often runs on top of TCP.
In computer networking, the User Datagram Protocol (UDP) is one of the core communication protocols of the Internet protocol suite used to send messages to other hosts on an Internet Protocol (IP) network. Within an IP network, UDP does not require prior communication to set up communication channels or data paths.

In computer networking, the transport layer is a conceptual division of methods in the layered architecture of protocols in the network stack in the Internet protocol suite and the OSI model. The protocols of this layer provide end-to-end communication services for applications. It provides services such as connection-oriented communication, reliability, flow control, and multiplexing.
A controller area network is a vehicle bus standard designed to allow microcontrollers and devices to communicate with each other. It is a message-based protocol, designed originally for multiplex electrical wiring within automobiles to save on copper, but it can also be used in many other contexts. For each device, the data in a frame is transmitted serially but in such a way that if more than one device transmits at the same time, the highest priority device can continue while the others back off. Frames are received by all devices, including by the transmitting device.
A vehicle bus is a specialized internal communications network that interconnects components inside a vehicle. In electronics, a bus is simply a device that connects multiple electrical or electronic devices together. Special requirements for vehicle control such as assurance of message delivery, of non-conflicting messages, of minimum time of delivery, of low cost, and of EMF noise resilience, as well as redundant routing and other characteristics mandate the use of less common networking protocols. Protocols include Controller Area Network (CAN), Local Interconnect Network (LIN) and others. Conventional computer networking technologies are rarely used, except in aircraft, where implementations of the ARINC 664 such as the Avionics Full-Duplex Switched Ethernet are used. Aircraft that use AFDX include the B787, the A400M and the A380. Trains commonly use Ethernet Consist Network (ECN). All cars sold in the United States since 1996 are required to have an On-Board Diagnostics connector, for access to the car's electronic controllers.
Society of Automotive Engineers standard SAE J1939 is the vehicle bus recommended practice used for communication and diagnostics among vehicle components. Originating in the car and heavy-duty truck industry in the United States, it is now widely used in other parts of the world.
LIN is a network protocol used for communication between components in modern vehicles. It is a low-cost single-wire serial protocol that supports communications up to 19.2 Kbit/s with a maximum bus length of 40 metres (131.2 ft).
In computer networking, the Datagram Congestion Control Protocol (DCCP) is a message-oriented transport layer protocol. DCCP implements reliable connection setup, teardown, Explicit Congestion Notification (ECN), congestion control, and feature negotiation. The IETF published DCCP as RFC 4340, a proposed standard, in March 2006. RFC 4336 provides an introduction.
The Open Systems Interconnection protocols are a family of information exchange standards developed jointly by the ISO and the ITU-T. The standardization process began in 1977.
General Motors Local Area Network (GMLAN) is an application- and transport-layer protocol using controller area network for lower layer services. It was standardized as SAE J2411 for use in OBD-II vehicle networks.

On-board diagnostics (OBD) is a term referring to a vehicle's self-diagnostic and reporting capability. In the United States, this self-diagnostic is a requirement to comply with Federal Emissions standards to detect failures that may increase the vehicle tailpipe emissions to more than 150% of the standard to which it was originally certified.
The internet layer is a group of internetworking methods, protocols, and specifications in the Internet protocol suite that are used to transport network packets from the originating host across network boundaries; if necessary, to the destination host specified by an IP address. The internet layer derives its name from its function facilitating internetworking, which is the concept of connecting multiple networks with each other through gateways.
ARINC 818: Avionics Digital Video Bus (ADVB) is a video interface and protocol standard developed for high bandwidth, low-latency, uncompressed digital video transmission in avionics systems. The standard, which was released in January 2007, has been advanced by ARINC and the aerospace community to meet the stringent needs of high performance digital video. The specification was updated and ARINC 818-2 was released in December 2013, adding a number of new features, including link rates up to 32X fibre channel rates, channel-bonding, switching, field sequential color, bi-directional control and data-only links.
A communication protocol is a system of rules that allows two or more entities of a communications system to transmit information via any variation of a physical quantity. The protocol defines the rules, syntax, semantics, and synchronization of communication and possible error recovery methods. Protocols may be implemented by hardware, software, or a combination of both.
ISO 15765-2, or ISO-TP (Transport Layer), is an international standard for sending data packets over a CAN-Bus. The protocol allows for the transport of messages that exceed the eight byte maximum payload of CAN frames. ISO-TP segments longer messages into multiple frames, adding metadata (CAN-TP Header) that allows the interpretation of individual frames and reassembly into a complete message packet by the recipient. It can carry up to 232-1 (4294967295) bytes of payload per message packet starting from the 2016 version. Prior version were limited to a maximum payload size of 4095 bytes.
The ELM327 is a programmed microcontroller produced for translating the on-board diagnostics (OBD) interface found in most modern cars. The ELM327 command protocol is one of the most popular PC-to-OBD interface standards and is also implemented by other vendors.
Unified Diagnostic Services (UDS) is a diagnostic communication protocol used in electronic control units (ECUs) within automotive electronics, which is specified in the ISO 14229-1. It is derived from ISO 14230-3 (KWP2000) and the now obsolete ISO 15765-3. 'Unified' in this context means that it is an international and not a company-specific standard. By now this communication protocol is used in all new ECUs made by Tier 1 suppliers of Original Equipment Manufacturer (OEM), and is incorporated into other standards, such as AUTOSAR. The ECUs in modern vehicles control nearly all functions, including electronic fuel injection (EFI), engine control, the transmission, anti-lock braking system, door locks, braking, window operation, and more.
CAN FD is a data-communication protocol used for broadcasting sensor data and control information on 2 wire interconnections between different parts of electronic instrumentation and control system. This protocol is used in modern high performance vehicles.
References
- ↑ Smith, Craig (2016). The Car Hacker's Handbook: A Guide for the Penetration Tester. No Starch Press. p. 22. ISBN 9781593277031 . Retrieved 10 May 2018.
| | This technology-related article is a stub. You can help Wikipedia by expanding it. |