Quality of service (QoS) is the description or measurement of the overall performance of a service, such as a telephony or computer network, or a cloud computing service, particularly the performance seen by the users of the network. To quantitatively measure quality of service, several related aspects of the network service are often considered, such as packet loss, bit rate, throughput, transmission delay, availability, jitter, etc.
100BaseVG is a 100 Mbit/s Ethernet standard specified to run over four pairs of Category 3 cable. It is also called 100VG-AnyLAN because it was defined to carry both Ethernet and Token Ring frame types.
Synchronous Optical Networking (SONET) and Synchronous Digital Hierarchy (SDH) are standardized protocols that transfer multiple digital bit streams synchronously over optical fiber using lasers or highly coherent light from light-emitting diodes (LEDs). At low transmission rates data can also be transferred via an electrical interface. The method was developed to replace the plesiochronous digital hierarchy (PDH) system for transporting large amounts of telephone calls and data traffic over the same fiber without the problems of synchronization.
A network switch is networking hardware that connects devices on a computer network by using packet switching to receive and forward data to the destination device.
In electronics and telecommunications, jitter is the deviation from true periodicity of a presumably periodic signal, often in relation to a reference clock signal. In clock recovery applications it is called timing jitter. Jitter is a significant, and usually undesired, factor in the design of almost all communications links.

The RapidIO architecture is a high-performance packet-switched electrical connection technology. It supports messaging, read/write and cache coherency semantics. Based on industry-standard electrical specifications such as those for Ethernet, RapidIO can be used as a chip-to-chip, board-to-board, and chassis-to-chassis interconnect.
Network performance refers to measures of service quality of a network as seen by the customer.
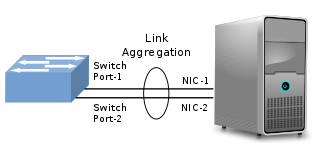
In computer networking, link aggregation is the combining of multiple network connections in parallel by any of several methods. Link aggregation increases total throughput beyond what a single connection could sustain, and provides redundancy where all but one of the physical links may fail without losing connectivity. A link aggregation group (LAG) is the combined collection of physical ports.
The Time-Triggered Protocol (TTP) is an open computer network protocol for control systems. It was designed as a time-triggered fieldbus for vehicles and industrial applications. and standardized in 2011 as SAE AS6003. TTP controllers have accumulated over 500 million flight hours in commercial DAL A aviation application, in power generation, environmental and flight controls. TTP is used in FADEC and modular aerospace controls, and flight computers. In addition, TTP devices have accumulated over 1 billion operational hours in SIL4 railway signalling applications.
In computer networking, a reliable protocol is a communication protocol that notifies the sender whether or not the delivery of data to intended recipients was successful. Reliability is a synonym for assurance, which is the term used by the ITU and ATM Forum.

Profinet is an industry technical standard for data communication over Industrial Ethernet, designed for collecting data from, and controlling equipment in industrial systems, with a particular strength in delivering data under tight time constraints. The standard is maintained and supported by Profibus and Profinet International, an umbrella organization headquartered in Karlsruhe, Germany.
Avionics Full-Duplex Switched Ethernet (AFDX), also ARINC 664, is a data network, patented by international aircraft manufacturer Airbus, for safety-critical applications that utilizes dedicated bandwidth while providing deterministic quality of service (QoS). AFDX is a worldwide registered trademark by Airbus. The AFDX data network is based on Ethernet technology using commercial off-the-shelf (COTS) components. The AFDX data network is a specific implementation of ARINC Specification 664 Part 7, a profiled version of an IEEE 802.3 network per parts 1 & 2, which defines how commercial off-the-shelf networking components will be used for future generation Aircraft Data Networks (ADN). The six primary aspects of an AFDX data network include full duplex, redundancy, determinism, high speed performance, switched and profiled network.
In computer networking, TUN and TAP are kernel virtual network devices. Being network devices supported entirely in software, they differ from ordinary network devices which are backed by physical network adapters.
Sercos III is the third generation of the Sercos interface, a standardized open digital interface for the communication between industrial controls, motion devices, input/output devices (I/O), and Ethernet nodes, such as PCs. Sercos III applies the hard real-time features of the Sercos interface to Ethernet. It is based upon the Ethernet standard. Work began on Sercos III in 2003, with vendors releasing first products supporting it in 2005.
High-availability Seamless Redundancy (HSR) is a network protocol for Ethernet that provides seamless failover against failure of any single network component. PRP and HSR are independent of the application-protocol and can be used by most Industrial Ethernet protocols in the IEC 61784 suite. HSR does not cover the failure of end nodes, but redundant nodes can be connected via HSR.
ITU-T Y.156sam Ethernet Service Activation Test Methodology is a draft recommendation under study by the ITU-T describing a new testing methodology adapted to the multiservice reality of packet-based networks.
ITU-T Y.1564 is an Ethernet service activation test methodology, which is the new ITU-T standard for turning up, installing and troubleshooting Ethernet-based services. It is the only standard test methodology that allows for complete validation of Ethernet service-level agreements (SLAs) in a single test.
Time-Sensitive Networking (TSN) is a set of standards under development by the Time-Sensitive Networking task group of the IEEE 802.1 working group. The TSN task group was formed in November 2012 by renaming the existing Audio Video Bridging Task Group and continuing its work. The name changed as a result of the extension of the working area of the standardization group. The standards define mechanisms for the time-sensitive transmission of data over deterministic Ethernet networks.
Deterministic Networking (DetNet) is an effort by the IETF DetNet Working Group to study implementation of deterministic data paths for real-time applications with extremely low data loss rates, packet delay variation (jitter), and bounded latency, such as audio and video streaming, industrial automation, and vehicle control.

Audio Video Bridging (AVB) is a common name for a set of technical standards that provide improved synchronization, low latency, and reliability for switched Ethernet networks. AVB embodies the following technologies and standards:
