Security
Because smart grid applications generally assume access by third parties to the same physical networks and underlying IP infrastructure of the grid, much work has been done to add Secure Authentication features to the DNP3 protocol. The DNP3 protocol is compliant with IEC 62351-5. Some vendors support encryption via bump-in-the-wire for serial communications or virtual private networks for Internet Protocol-based communications. One of the most popular bump-in-the-wire methods began originally as AGA-12 (American Gas Association) in 2003, later becoming IEEE Std. 1711-2010. This standard was subsequently withdrawn March 27, 2014.
The DNP3 protocol is also referenced in IEEE Std. IEEE 1379-2000, which recommends a set of best practices for implementing modern SCADA Master-RTU/IED communication links. These include not just encryption but other practices that enhance security against well known intrusion methods.
It is recommended to use DNP3 with TLS, Transport Layer Security, in accordance with IEC 62351-3.
Technical details
The DNP3 protocol has significant features that make it more robust, efficient, and interoperable than older protocols such as Modbus, at the cost of higher complexity.
In terms of the OSI model for networks, DNP3 specifies a layer 2 protocol. It provides multiplexing, data fragmentation, error checking, link control, prioritization, and layer 2 addressing services for user data. It also defines a Transport function (somewhat similar to the function of layer 4) and an Application Layer (layer 7) that defines functions and generic data types suitable for common SCADA applications. The DNP3 frame strongly resembles, but is not identical to the IEC 60870-5 FT3 frame. It makes heavy use of cyclic redundancy check codes to detect errors.
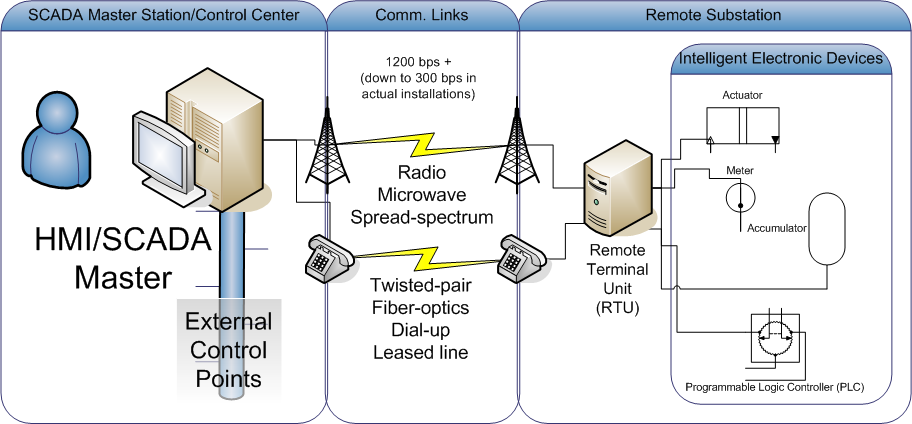
The improved bandwidth efficiency is accomplished through event oriented data reporting. The Remote Terminal Unit monitors data points and generates events when it determines that the data should be reported (for example, when it changes value). These events are each placed in one of three buffers, associated with "Classes" 1, 2 and 3. In addition to these, Class 0 is defined as the "static" or current status of the monitored data.
The Remote Terminal Unit is initially interrogated with what DNP3 terms an "Integrity Poll" (a combined Read of Class 1, 2, 3 and 0 data). This causes the Remote Terminal Unit to send all buffered events and also all static point data to the Master station. Following this, the Master polls for the event data by reading Class 1, Class 2 or Class 3. The reading of the classes can all be performed together or each class can be read at a different rate, providing a mechanism to create different reporting priorities for the different classes. After an Integrity Poll, only significant data changes are sent. This can result in significantly more responsive data retrieval than polling everything, all the time, irrespective of whether it has changed significantly.
The Remote Terminal Unit can also be configured to spontaneously report Class 1, 2, or 3 data, when it becomes available.
The DNP3 protocol supports time synchronization with an RTU. DNP3 has time stamped variants of all point data objects so that even with infrequent RTU polling, it is still possible to receive enough data to reconstruct a sequence of events of what happened in between the polls.
The DNP3 protocol has a substantial library of common point-oriented objects. The focus of this extensive library was to eliminate the need for bit-mapping data over other objects, as is often done in many Modbus installations. For example, floating point number variants are available, so there is no need to map the number on to a pair of 16 bit registers. This improves compatibility and eliminates problems such as endianness.
A Remote Terminal Unit for the DNP3 protocol can be a small, simple embedded device, or it can be a large, complex rack filled with equipment. The DNP Users Group has established four levels of subsets (or profiles) of the protocol for RTU compliance. The DNP Users Group has published IED certification test procedures for Subset Levels 1, 2 and 3, [1] ) and Controlling Station test procedures that verify a range of functions.