Related Research Articles

Running is a method of terrestrial locomotion allowing humans and other animals to move rapidly on foot. Running is a type of gait characterized by an aerial phase in which all feet are above the ground. This is in contrast to walking, where one foot is always in contact with the ground, the legs are kept mostly straight and the center of gravity vaults over the stance leg or legs in an inverted pendulum fashion. A feature of a running body from the viewpoint of spring-mass mechanics is that changes in kinetic and potential energy within a stride occur simultaneously, with energy storage accomplished by springy tendons and passive muscle elasticity. The term running can refer to any of a variety of speeds ranging from jogging to sprinting.

In medicine, a prosthesis or prosthetic implant is an artificial device that replaces a missing body part, which may be lost through trauma, disease, or a condition present at birth. Prostheses are intended to restore the normal functions of the missing body part. Amputee rehabilitation is primarily coordinated by a physiatrist as part of an inter-disciplinary team consisting of physiatrists, prosthetists, nurses, physical therapists, and occupational therapists. Prostheses can be created by hand or with computer-aided design (CAD), a software interface that helps creators design and analyze the creation with computer-generated 2-D and 3-D graphics as well as analysis and optimization tools.

Biomechanics is the study of the structure, function and motion of the mechanical aspects of biological systems, at any level from whole organisms to organs, cells and cell organelles, using the methods of mechanics. Biomechanics is a branch of biophysics.

Gait analysis is the systematic study of animal locomotion, more specifically the study of human motion, using the eye and the brain of observers, augmented by instrumentation for measuring body movements, body mechanics, and the activity of the muscles. Gait analysis is used to assess and treat individuals with conditions affecting their ability to walk. It is also commonly used in sports biomechanics to help athletes run more efficiently and to identify posture-related or movement-related problems in people with injuries.

Physical strength is the measure of a human's exertion of force on physical objects. Increasing physical strength is the goal of strength training.

A gait is a pattern of limb movements made during locomotion. Human gaits are the various ways in which a human can move, either naturally or as a result of specialized training. Human gait is defined as bipedal, biphasic forward propulsion of the center of gravity of the human body, in which there are alternate sinuous movements of different segments of the body with least expenditure of energy. Different gait patterns are characterized by differences in limb-movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in the contact with the ground.
Inverse dynamics is an inverse problem. It commonly refers to either inverse rigid body dynamics or inverse structural dynamics. Inverse rigid-body dynamics is a method for computing forces and/or moments of force (torques) based on the kinematics (motion) of a body and the body's inertial properties. Typically it uses link-segment models to represent the mechanical behaviour of interconnected segments, such as the limbs of humans or animals or the joint extensions of robots, where given the kinematics of the various parts, inverse dynamics derives the minimum forces and moments responsible for the individual movements. In practice, inverse dynamics computes these internal moments and forces from measurements of the motion of limbs and external forces such as ground reaction forces, under a special set of assumptions.
In medicine, physiotherapy, chiropractic, and osteopathy the hip examination, or hip exam, is undertaken when a patient has a complaint of hip pain and/or signs and/or symptoms suggestive of hip joint pathology. It is a physical examination maneuver.

Pedobarography is the study of pressure fields acting between the plantar surface of the foot and a supporting surface. Used most often for biomechanical analysis of gait and posture, pedobarography is employed in a wide range of applications including sports biomechanics and gait biometrics. The term 'pedobarography' is derived from the Latin: pedes, referring to the foot, and the Greek: baros meaning 'weight' and also 'pressure'.

Orthotics is a medical specialty that focuses on the design and application of orthoses. An orthosis is "an externally applied device used to influence the structural and functional characteristics of the neuromuscular and skeletal system".
Christopher L. 'Kit' Vaughan, DSc,, is Emeritus Professor of Biomedical Engineering in the Department of Human Biology, University of Cape Town in South Africa.
Obesity and walking describes how the locomotion of walking differs between an obese individual and a non-obese individual. The prevalence of obesity is becoming a worldwide problem, with the American population leading the way. In 2007-2008, prevalence rates for obesity among adult American men were approximately 32% and over 35% amongst adult American women. According to the Johns Hopkins Bloomberg School of Public Health, 66% of the American population is either overweight or obese and this number is predicted to increase to 75% by 2015. Obesity is linked to health problems such as decreased insulin sensitivity and diabetes, cardiovascular disease, cancer, sleep apnea, and joint pain such as osteoarthritis. It is thought that a major factor of obesity is that obese individuals are in a positive energy balance, meaning that they are consuming more calories than they are expending. Humans expend energy through their basal metabolic rate, the thermic effect of food, non-exercise activity thermogenesis (NEAT), and exercise. While many treatments for obesity are presented to the public, exercise in the form of walking is an easy, relatively safe activity that has the potential to move a person towards a negative energy balance and if done for a long enough time may reduce weight.
Terrestrial locomotion by means of a running gait can be accomplished on level surfaces. However, in most outdoor environments an individual will experience terrain undulations requiring uphill running. Similar conditions can be mimicked in a controlled environment on a treadmill also. Additionally, running on inclines is used by runners, both distance and sprinter, to improve cardiovascular conditioning and lower limb strength.

David A. Winter is a distinguished professor emeritus of the University of Waterloo. He was a founding member of the Canadian Society for Biomechanics and its first Career Award winner. He was later awarded the Muybridge Medal of the International Society of Biomechanics (ISB) and the Lifetime Achievement Award of The Gait and Clinical Movement Analysis Society. Before becoming an academic he served as an electrical officer with the Royal Canadian Navy on HMCS Nootka from 1952 to 1958. He completed his service at the rank of lieutenant commander. In December 2011, ISB named an award to encourage young people to stay involved in biomechanics research the "David Winter Young Investigator Award."
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
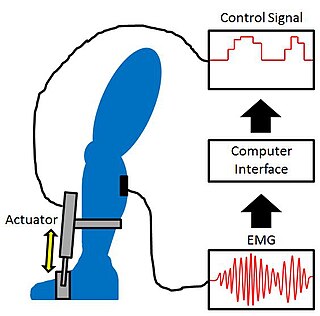
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
X-ray motion analysis is a technique used to track the movement of objects using X-rays. This is done by placing the subject to be imaged in the center of the X-ray beam and recording the motion using an image intensifier and a high-speed camera, allowing for high quality videos sampled many times per second. Depending on the settings of the X-rays, this technique can visualize specific structures in an object, such as bones or cartilage. X-ray motion analysis can be used to perform gait analysis, analyze joint movement, or record the motion of bones obscured by soft tissue. The ability to measure skeletal motions is a key aspect to one's understanding of vertebrate biomechanics, energetics, and motor control.
Robotic prosthesis control is a method for controlling a prosthesis in such a way that the controlled robotic prosthesis restores a biologically accurate gait to a person with a loss of limb. This is a special branch of control that has an emphasis on the interaction between humans and robotics.

Gait deviations are nominally referred to as any variation of standard human gait, typically manifesting as a coping mechanism in response to an anatomical impairment. Lower-limb amputees are unable to maintain the characteristic walking patterns of an able-bodied individual due to the removal of some portion of the impaired leg. Without the anatomical structure and neuromechanical control of the removed leg segment, amputees must use alternative compensatory strategies to walk efficiently. Prosthetic limbs provide support to the user and more advanced models attempt to mimic the function of the missing anatomy, including biomechanically controlled ankle and knee joints. However, amputees still display quantifiable differences in many measures of ambulation when compared to able-bodied individuals. Several common observations are whole-body movements, slower and wider steps, shorter strides, and increased sway.
The function of the lower limbs during walking is to support the whole-body against gravitational forces while generating movement patterns which progress the body forward. Walking is an activity that is primarily confined to the sagittal plane, which is also described as the plane of progression. During one gait cycle, there are two major phases: stance and swing. In a healthy individual walking at a normal walking speed, stance phase makes up approximately 60% of one gait cycle and swing makes up the remaining 40%. The lower limbs are only in contact with the ground during stance phase which is typically subdivided into 5 events: heel contact, foot flat, mid-stance, heel off, and toe off. The majority of stance phase (~40%) takes place in single-limb support where one limb is in contact with the ground and the contralateral limb is in swing phase. During this time interval, the lower limb must support constant changes in alignment of body weight while propelling forward. The hip, knee, and ankle joints move through cyclical kinematic patterns that are controlled by muscles which cross these joints. As postural changes occur, the body adapts by motor tuning an efficient muscular pattern that will accomplish the necessary kinematics required to walk.
References
- ↑ Cimolin, Veronica; Condoluci, Claudia; Costici, Pier Francesco; Galli, Manuela (2019). "A proposal for a kinetic summary measure: The Gait Kinetic Index". Computer Methods in Biomechanics and Biomedical Engineering. 22 (1): 94–99. doi:10.1080/10255842.2018.1536750. PMID 30444127.