In mathematics, more specifically in functional analysis, a Banach space is a complete normed vector space. Thus, a Banach space is a vector space with a metric that allows the computation of vector length and distance between vectors and is complete in the sense that a Cauchy sequence of vectors always converges to a well-defined limit that is within the space.
In mathematical analysis, a metric space M is called complete if every Cauchy sequence of points in M has a limit that is also in M.

In mathematics, a metric space is a set together with a notion of distance between its elements, usually called points. The distance is measured by a function called a metric or distance function. Metric spaces are the most general setting for studying many of the concepts of mathematical analysis and geometry.
In mathematics, a topological space is called separable if it contains a countable, dense subset; that is, there exists a sequence of elements of the space such that every nonempty open subset of the space contains at least one element of the sequence.
This is a glossary of some terms used in the branch of mathematics known as topology. Although there is no absolute distinction between different areas of topology, the focus here is on general topology. The following definitions are also fundamental to algebraic topology, differential topology and geometric topology. For a list of terms specific to algebraic topology, see Glossary of algebraic topology.
In differential geometry, a Riemannian manifold is a geometric space on which many geometric notions such as distance, angles, length, volume, and curvature are defined. Euclidean space, the -sphere, hyperbolic space, and smooth surfaces in three-dimensional space, such as ellipsoids and paraboloids, are all examples of Riemannian manifolds. Riemannian manifolds are named after German mathematician Bernhard Riemann, who first conceptualized them.
In the area of mathematics known as functional analysis, a reflexive space is a locally convex topological vector space for which the canonical evaluation map from into its bidual is a homeomorphism. A normed space is reflexive if and only if this canonical evaluation map is surjective, in which case this evaluation map is an isometric isomorphism and the normed space is a Banach space. Those spaces for which the canonical evaluation map is surjective are called semi-reflexive spaces.
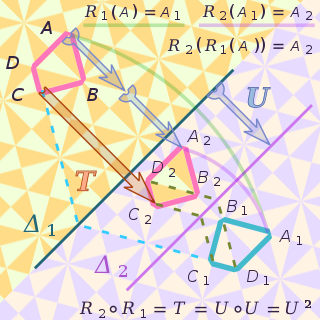
In mathematics, an isometry is a distance-preserving transformation between metric spaces, usually assumed to be bijective. The word isometry is derived from the Ancient Greek: ἴσος isos meaning "equal", and μέτρον metron meaning "measure". If the transformation is from a metric space to itself, it is a kind of geometric transformation known as a motion.
In complex analysis, the Hardy spaces are spaces of holomorphic functions on the unit disk or upper half plane. They were introduced by Frigyes Riesz, who named them after G. H. Hardy, because of the paper. In real analysis Hardy spaces are spaces of distributions on the real n-space , defined as boundary values of the holomorphic functions. are related to the Lp spaces. For these Hardy spaces are subsets of spaces, while for the spaces have some undesirable properties, and the Hardy spaces are much better behaved. Hence, spaces can be considered extensions of spaces.
In mathematics, the universal enveloping algebra of a Lie algebra is the unital associative algebra whose representations correspond precisely to the representations of that Lie algebra.
In mathematics and especially differential geometry, a Kähler manifold is a manifold with three mutually compatible structures: a complex structure, a Riemannian structure, and a symplectic structure. The concept was first studied by Jan Arnoldus Schouten and David van Dantzig in 1930, and then introduced by Erich Kähler in 1933. The terminology has been fixed by André Weil. Kähler geometry refers to the study of Kähler manifolds, their geometry and topology, as well as the study of structures and constructions that can be performed on Kähler manifolds, such as the existence of special connections like Hermitian Yang–Mills connections, or special metrics such as Kähler–Einstein metrics.
In mathematics, a hyperbolic metric space is a metric space satisfying certain metric relations between points. The definition, introduced by Mikhael Gromov, generalizes the metric properties of classical hyperbolic geometry and of trees. Hyperbolicity is a large-scale property, and is very useful to the study of certain infinite groups called Gromov-hyperbolic groups.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.
In metric geometry, the metric envelope or tight span of a metric space M is an injective metric space into which M can be embedded. In some sense it consists of all points "between" the points of M, analogous to the convex hull of a point set in a Euclidean space. The tight span is also sometimes known as the injective envelope or hyperconvex hull of M. It has also been called the injective hull, but should not be confused with the injective hull of a module in algebra, a concept with a similar description relative to the category of R-modules rather than metric spaces.
In metric geometry, an injective metric space, or equivalently a hyperconvex metric space, is a metric space with certain properties generalizing those of the real line and of L∞ distances in higher-dimensional vector spaces. These properties can be defined in two seemingly different ways: hyperconvexity involves the intersection properties of closed balls in the space, while injectivity involves the isometric embeddings of the space into larger spaces. However it is a theorem of Aronszajn & Panitchpakdi (1956) that these two different types of definitions are equivalent.

In mathematics, a quasi-isometry is a function between two metric spaces that respects large-scale geometry of these spaces and ignores their small-scale details. Two metric spaces are quasi-isometric if there exists a quasi-isometry between them. The property of being quasi-isometric behaves like an equivalence relation on the class of metric spaces.
In metric geometry, asymptotic dimension of a metric space is a large-scale analog of Lebesgue covering dimension. The notion of asymptotic dimension was introduced by Mikhail Gromov in his 1993 monograph Asymptotic invariants of infinite groups in the context of geometric group theory, as a quasi-isometry invariant of finitely generated groups. As shown by Guoliang Yu, finitely generated groups of finite homotopy type with finite asymptotic dimension satisfy the Novikov conjecture. Asymptotic dimension has important applications in geometric analysis and index theory.
In functional analysis and related areas of mathematics, a complete topological vector space is a topological vector space (TVS) with the property that whenever points get progressively closer to each other, then there exists some point towards which they all get closer. The notion of "points that get progressively closer" is made rigorous by Cauchy nets or Cauchy filters, which are generalizations of Cauchy sequences, while "point towards which they all get closer" means that this Cauchy net or filter converges to The notion of completeness for TVSs uses the theory of uniform spaces as a framework to generalize the notion of completeness for metric spaces. But unlike metric-completeness, TVS-completeness does not depend on any metric and is defined for all TVSs, including those that are not metrizable or Hausdorff.
In the mathematical discipline of functional analysis, a differentiable vector-valued function from Euclidean space is a differentiable function valued in a topological vector space (TVS) whose domains is a subset of some finite-dimensional Euclidean space. It is possible to generalize the notion of derivative to functions whose domain and codomain are subsets of arbitrary topological vector spaces (TVSs) in multiple ways. But when the domain of a TVS-valued function is a subset of a finite-dimensional Euclidean space then many of these notions become logically equivalent resulting in a much more limited number of generalizations of the derivative and additionally, differentiability is also more well-behaved compared to the general case. This article presents the theory of -times continuously differentiable functions on an open subset of Euclidean space , which is an important special case of differentiation between arbitrary TVSs. This importance stems partially from the fact that every finite-dimensional vector subspace of a Hausdorff topological vector space is TVS isomorphic to Euclidean space so that, for example, this special case can be applied to any function whose domain is an arbitrary Hausdorff TVS by restricting it to finite-dimensional vector subspaces.
In functional analysis and related areas of mathematics, a metrizable topological vector space (TVS) is a TVS whose topology is induced by a metric. An LM-space is an inductive limit of a sequence of locally convex metrizable TVS.























