Line or vector perpendicular to a curve or a surface
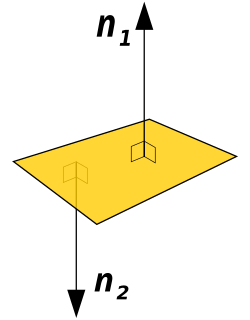
A polygon and its two normal vectorsA normal to a surface at a point is the same as a normal to the tangent plane to the surface at the same point.Tangent and normal to a curve in a Cartesian coordinate system.
A normal vector is a vector perpendicular to a given object at a particular point. A normal vector of length one is called a unit normal vector or normal direction. A curvature vector is a normal vector whose length is the curvature of the object. Multiplying a normal vector by −1 results in the opposite vector, which may be used for indicating sides (e.g., interior or exterior) or orientation (e.g., clockwise vs. counterclockwise, right handed vs. left handed).
In three-dimensional space, a surface normal, or simply normal, to a surface at point P is a vector perpendicular to the tangent plane of the surface at P. The vector field of normal directions to a surface is known as Gauss map. The word "normal" is also used as an adjective: a line normal to a plane, the normal component of a force, etc. The concept of normality generalizes to orthogonality (right angles).
The concept has been generalized to differentiable manifolds of arbitrary dimension embedded in a Euclidean space. The normal vector space or normal space of a manifold at point is the set of vectors which are orthogonal to the tangent space at Normal vectors are of special interest in the case of smooth curves and smooth surfaces.
The normal is often used in 3D computer graphics (notice the singular, as only one normal will be defined) to determine a surface's orientation toward a light source for flat shading, or the orientation of each of the surface's corners (vertices) to mimic a curved surface with Phong shading.
The foot of a normal at a point of interest Q (analogous to the foot of a perpendicular) can be defined at the point P on the surface where the normal vector contains Q. The normal distance of a point Q to a curve or to a surface is the Euclidean distance between Q and its foot P.
For a convexpolygon (such as a triangle), a surface normal can be calculated as the vector cross product of two (non-parallel) edges of the polygon.
For a plane given by the general form plane equation the vector is a normal.
For a plane whose equation is given in parametric form where is a point on the plane and are non-parallel vectors pointing along the plane, a normal to the plane is a vector normal to both and which can be found as the cross product
Normal to general surfaces in 3D space
A curved surface showing the unit normal vectors (blue arrows) to the surface
If a (possibly non-flat) surface in 3D space is parameterized by a system of curvilinear coordinates with and real variables, then a normal to S is by definition a normal to a tangent plane, given by the cross product of the partial derivatives
For a surface in given as the graph of a function an upward-pointing normal can be found either from the parametrization giving or more simply from its implicit form giving Since a surface does not have a tangent plane at a singular point, it has no well-defined normal at that point: for example, the vertex of a cone. In general, it is possible to define a normal almost everywhere for a surface that is Lipschitz continuous.
Orientation
A vector field of normals to a surface
The normal to a (hyper)surface is usually scaled to have unit length, but it does not have a unique direction, since its opposite is also a unit normal. For a surface which is the topological boundary of a set in three dimensions, one can distinguish between two normal orientations, the inward-pointing normal and outer-pointing normal. For an oriented surface, the normal is usually determined by the right-hand rule or its analog in higher dimensions.
If the normal is constructed as the cross product of tangent vectors (as described in the text above), it is a pseudovector.
Transforming normals
in this section we only use the upper matrix, as translation is irrelevant to the calculation
When applying a transform to a surface it is often useful to derive normals for the resulting surface from the original normals.
Specifically, given a 3×3 transformation matrix we can determine the matrix that transforms a vector perpendicular to the tangent plane into a vector perpendicular to the transformed tangent plane by the following logic:
Write n′ as We must find
Choosing such that or will satisfy the above equation, giving a perpendicular to or an perpendicular to as required.
Therefore, one should use the inverse transpose of the linear transformation when transforming surface normals. The inverse transpose is equal to the original matrix if the matrix is orthonormal, that is, purely rotational with no scaling or shearing.
Hypersurfaces in n-dimensional space
For an -dimensional hyperplane in -dimensional space given by its parametric representation where is a point on the hyperplane and for are linearly independent vectors pointing along the hyperplane, a normal to the hyperplane is any vector in the null space of the matrix meaning . That is, any vector orthogonal to all in-plane vectors is by definition a surface normal. Alternatively, if the hyperplane is defined as the solution set of a single linear equation , then the vector is a normal.
The definition of a normal to a surface in three-dimensional space can be extended to -dimensional hypersurfaces in . A hypersurface may be locally defined implicitly as the set of points satisfying an equation , where is a given scalar function. If is continuously differentiable then the hypersurface is a differentiable manifold in the neighbourhood of the points where the gradient is not zero. At these points a normal vector is given by the gradient:
The normal line is the one-dimensional subspace with basis
A vector that is normal to the space spanned by the linearly independent vectors v1, ..., vr−1 and falls within the r-dimensional space spanned by the linearly independent vectors v1, ..., vr is given by the r-th column of the matrix Λ = V(VTV)−1, where the matrix V = (v1, ..., vr) is the juxtaposition of the r column vectors. (Proof: Λ is V times a matrix so each column of Λ is a linear combination of the columns of V. Furthermore, VTΛ = I, so each column of V other than the last is perpendicular to the last column of Λ.) This formula works even when r is less than the dimension of the Euclidean space n. The formula simplifies to Λ = (VT)−1 when r = n.
Varieties defined by implicit equations in n-dimensional space
A differential variety defined by implicit equations in the -dimensional space is the set of the common zeros of a finite set of differentiable functions in variables The Jacobian matrix of the variety is the matrix whose -th row is the gradient of By the implicit function theorem, the variety is a manifold in the neighborhood of a point where the Jacobian matrix has rank At such a point the normal vector space is the vector space generated by the values at of the gradient vectors of the
In other words, a variety is defined as the intersection of hypersurfaces, and the normal vector space at a point is the vector space generated by the normal vectors of the hypersurfaces at the point.
The normal (affine) space at a point of the variety is the affine subspace passing through and generated by the normal vector space at
These definitions may be extended verbatim to the points where the variety is not a manifold.
Example
Let V be the variety defined in the 3-dimensional space by the equations This variety is the union of the -axis and the -axis.
At a point where the rows of the Jacobian matrix are and Thus the normal affine space is the plane of equation Similarly, if the normal plane at is the plane of equation
At the point the rows of the Jacobian matrix are and Thus the normal vector space and the normal affine space have dimension 1 and the normal affine space is the -axis.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.