
A CubeSat is a class of miniaturized satellite based around a form factor consisting of 10 cm (3.9 in) cubes. CubeSats have a mass of no more than 2 kg (4.4 lb) per unit, and often use commercial off-the-shelf (COTS) components for their electronics and structure. CubeSats are put into orbit by deployers on the International Space Station, or launched as secondary payloads on a launch vehicle. As of August 2021, more than 1,600 CubeSats have been launched.
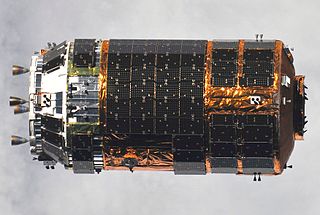
The H-II Transfer Vehicle (HTV), also called Kounotori, is an expendable, automated cargo spacecraft used to resupply the Kibō Japanese Experiment Module (JEM) and the International Space Station (ISS). The Japan Aerospace Exploration Agency (JAXA) has been working on the design since the early 1990s. The first mission, HTV-1, was originally intended to be launched in 2001. It launched at 17:01 UTC on 10 September 2009 on an H-IIB launch vehicle. The name Kounotori was chosen for the HTV by JAXA because "a white stork carries an image of conveying an important thing, therefore, it precisely expresses the HTV's mission to transport essential materials to the ISS". The HTV is very important for resupplying the ISS because after the retirement of the Space Shuttle it is the only vehicle that can transfer new 41.3 in (105 cm) wide International Standard Payload Racks (ISPRs) and dispose old ISPRs that can fit the 51 in (130 cm) wide tunnels between modules in the US Orbital Segment.

Uncrewed spaceflights to the International Space Station (ISS) are made primarily to deliver cargo, however several Russian modules have also docked to the outpost following uncrewed launches. Resupply missions typically use the Russian Progress spacecraft, European Automated Transfer Vehicles, Japanese Kounotori vehicles, and the American Dragon and Cygnus spacecraft. The primary docking system for Progress spacecraft is the automated Kurs system, with the manual TORU system as a backup. ATVs also use Kurs, however they are not equipped with TORU. Progress and ATV can remain docked for up to six months. The other spacecraft — the Japanese HTV, the SpaceX Dragon and the Northrop Grumman Cygnus — rendezvous with the station before being grappled using Canadarm2 and berthed at the nadir port of the Harmony or Unity module for one to two months. Under CRS phase 2, Cargo Dragon docks autonomously at IDA-2 or 3 as the case may be. As of December 2022, Progress spacecraft have flown most of the uncrewed missions to the ISS.
RAIKO is a Japanese satellite which was built and operated by Tohoku and Wakayama Universities. A two-unit CubeSat, RAIKO was deployed from the International Space Station (ISS) on 4 October 2012, having been launched on 21 July 2012.

Kounotori 2, also known as HTV-2, was launched in January 2011 and was the second flight of the Japanese H-II Transfer Vehicle to resupply the International Space Station (ISS). It was launched by the H-IIB Launch Vehicle No. 2 manufactured by Mitsubishi Heavy Industries (MHI) and JAXA. After the supplies were unloaded, Kounotori 2 was loaded with waste material from ISS, including used experiment equipment and used clothes. Kounotori 2 was then unberthed and separated from the ISS and burned up upon reentering the atmosphere on 30 March 2011.

F-1 is a CubeSat built by FSpace laboratory at FPT University, in Hanoi, Vietnam, in partnership with Angstrom Space Technology Center (ASTC), Uppsala University, Sweden and Nanoracks LLC, United States. Its mission is to train young engineers and students about aerospace engineering and evaluate an advanced three-axis magnetometer, Spin-Dependent Tunneling Magnetometer (SDTM) designed in Sweden by ASTC.

Several new rockets and spaceports began operations in 2016.

KickSat was a satellite dispenser for small-satellite (femtosatellite) project inaugurated in early October 2011, to launch many very small satellites from a 3U CubeSat. The satellites have been characterized as being the size of a large postage stamp. and also as "cracker size". The mission launch was originally scheduled for late 2013 and was launched April 18, 2014.
Technology Education Satellite (TechEdSat) is a successful nano-sat flight series conducted from the NASA Ames Research Center in collaboration with numerous universities. While one of the principal aims has been to introduce young professionals and university students to the practical realm of developing space flight hardware, considerable innovations have been introduced. In addition, this evolving flight platform has tested concepts for Low Earth Orbit (LEO) sample return, as well as planetary nano-sat class mission concepts.

Kounotori 3, also known as HTV-3, was the third flight of the Japanese H-II Transfer Vehicle. It was launched on 21 July 2012 to resupply the International Space Station (ISS) aboard the H-IIB Launch Vehicle No. 3 manufactured by Mitsubishi Heavy Industries (MHI) and JAXA. Kounotori 3 arrived at the ISS on 27 July 2012, and Expedition 32 Flight Engineer and JAXA astronaut Akihiko Hoshide used the International Space Station's Canadarm2 robotic arm to install Kounotori 3, to its docking port on the Earth-facing side (nadir) of the Harmony module at 14:34 UTC.

Nanoracks LLC is a private in-space services company which builds space hardware and in-space repurposing tools. The company also facilitates experiments and launches of CubeSats to Low Earth Orbit.

WE WISH was a small commercial CubeSat which was deployed from the International Space Station (ISS) in October 2012 and which deorbited in March 2013. It was built by the Japanese technology company Meisei Electric and the Meisei Amateur Radio Club, and could transmit pictures taken by a small infrared camera via radio at 437.515 MHz. WE WISH travelled to orbit aboard Kounotori 3 (HTV-3) on 21 July 2012, along with other CubeSats including RAIKO, FITSAT-1, F-1, and TechEdSat-1.

Kounotori 4, also known as HTV-4, was the fourth flight of the H-II Transfer Vehicle, an uncrewed cargo spacecraft launched in August 2013 to resupply the International Space Station. It launched from Tanegashima Space Center aboard H-IIB No. 4 rocket on 3 August 2013 and connected to ISS by 9 August 2013; it carried 5,400 kilograms (11,900 lb) of cargo. Kounotori 4 undocked on 4 September 2013 and was destroyed by reentry on 7 September 2013.

Kounotori 5, also known as HTV-5, was the fifth flight of the H-II Transfer Vehicle, an uncrewed cargo spacecraft launched to resupply the International Space Station. It was launched on 19 August 2015.

The Nanoracks CubeSat Deployer (NRCSD) is a device to deploy CubeSats into orbit from the International Space Station (ISS).
Spire Global, Inc. is a space-to-cloud data and analytics company that specializes in the tracking of global data sets powered by a large constellation of nanosatellites, such as the tracking of maritime, aviation and weather patterns.

Kounotori 6 (こうのとり6号機), also known as HTV-6, was the sixth flight of the H-II Transfer Vehicle, an uncrewed cargo spacecraft launched to resupply the International Space Station. It was launched at 13:26:47 UTC on 9 December 2016 aboard H-IIB launch vehicle from Tanegashima Space Center.

Kounotori 7 (こうのとり7号機), also known as HTV-7 was the seventh flight of the H-II Transfer Vehicle (HTV), an uncrewed cargo spacecraft launched on 22 September 2018 to resupply the International Space Station.

Kounotori 8 (こうのとり8号機), also known as HTV-8 was the 8th flight of the H-II Transfer Vehicle, a robotic cargo spacecraft to resupply the International Space Station. It was launched on 24 September 2019, 16:05:05 UTC.



