Human spaceflight programs have been conducted, started, or planned by multiple countries and companies. Until the 21st century, human spaceflight programs were sponsored exclusively by governments, through either the military or civilian space agencies. With the launch of the privately funded SpaceShipOne in 2004, a new category of human spaceflight programs – commercial human spaceflight – arrived. As of July 2021, three countries and one private company (SpaceX) have launched humans to Earth orbit, and two private companies have launched humans on a suborbital trajectory. The criteria for what constitutes human spaceflight vary. The Fédération Aéronautique Internationale defines spaceflight as any flight over 100 kilometers (62 mi). In the United States professional, military, and commercial astronauts who travel above an altitude of 80 kilometers (50 mi) are awarded the United States Astronaut Badge. This article follows the FAI definition of spaceflight.

STS-74 was the fourth mission of the US/Russian Shuttle-Mir Program, and the second docking of the Space Shuttle with Mir. Space Shuttle Atlantis lifted off from Kennedy Space Center launch pad 39A on 12 November 1995. The mission ended 8 days later with the landing of Atlantis back at Kennedy. It was the second in a series of seven straight missions to the station flown by Atlantis.

STS-72 was a Space Shuttle Endeavour mission to capture and return to Earth a Japanese microgravity research spacecraft known as Space Flyer Unit (SFU). The mission launched from Kennedy Space Center, Florida on 11 January 1996.

The Japan Aerospace Exploration Agency (JAXA) is the Japanese national aerospace and space agency. Through the merger of three previously independent organizations, JAXA was formed on 1 October 2003. JAXA is responsible for research, technology development and launch of satellites into orbit, and is involved in many more advanced missions such as asteroid exploration and possible human exploration of the Moon. Its motto is One JAXA and its corporate slogan is Explore to Realize.

A space rendezvous is a set of orbital maneuvers during which two spacecraft, one of which is often a space station, arrive at the same orbit and approach to a very close distance. Rendezvous requires a precise match of the orbital velocities and position vectors of the two spacecraft, allowing them to remain at a constant distance through orbital station-keeping. Rendezvous may or may not be followed by docking or berthing, procedures which bring the spacecraft into physical contact and create a link between them.
Hikoboshi is the Japanese name for the star Altair, also known as Natsuhikoboshi or Kengyūsei in Japanese.

Shenzhou 8 was an uncrewed flight of China's Shenzhou program, launched on 31 October 2011 UTC, or 1 November 2011 in China, by a Long March 2F rocket which lifted off from the Jiuquan Satellite Launch Center.
Ajisai is a Japanese satellite sponsored by NASDA, launched in 1986 on the first flight of the H-I rocket. It is also known as the Experimental Geodetic Satellite (EGS), as it carried the Experimental Geodetic Payload (EGP).
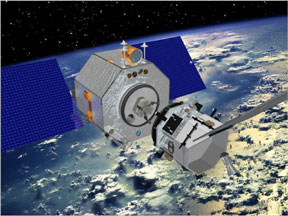
Orbital Express was a space mission managed by the United States Defense Advanced Research Projects Agency (DARPA) and a team led by engineers at NASA's Marshall Space Flight Center (MSFC). The Orbital Express program was aimed at developing "a safe and cost-effective approach to autonomously service satellites in orbit". The system consisted of two spacecraft: the ASTRO servicing satellite, and a prototype modular next-generation serviceable satellite; NEXTSat. The mission launched from Cape Canaveral Air Force Station on 8 March 2007, aboard an Atlas V expendable launch vehicle. The launch was part of the United States Air Force Space Test Program STP-1 mission.

The H-II (H2) rocket was a Japanese satellite launch system, which flew seven times between 1994 and 1999, with five successes. It was developed by NASDA in order to give Japan a capability to launch larger satellites in the 1990s. It was the first two-stage liquid-fuelled rocket Japan made using only technologies developed domestically. It was superseded by the H-IIA rocket following reliability and cost issues.
JAXA Engineering Test Satellite ETS-VIII is the eighth technology test satellite in a series which started with ETS-1 in 1975 by NASDA. It was launched with the H-2A on December 18, 2006. ETS-VIII was developed by JAXA in cooperation with NICT and NTT. The aim of ETS-VIII is to enable satellite communications with small terminals. Unlike the Iridium satellites for mobile communication, ETS-VIII is positioned at GEO. However to fulfill the task the satellite must carry two very large antennas. It was the first use of the 204 configuration of the H-IIA launch vehicle.
Several Asian national space programs are attempting to achieve the scientific and technological advancements necessary for regular spaceflight, as well as to reap the strategic and economic benefits of space capability. This is sometimes referred to as the Asian space race in popular media, an allusion to the Cold-War-era Space Race between the United States and the Soviet Union.

The N-I or N-1 was a derivative of the American Thor-Delta rocket, produced under license in Japan. The N stood for "Nippon" (Japan). It used a Long Tank Thor first stage, a Mitsubishi Heavy Industries-designed LE-3 engine on the second stage, and three Castor SRMs. Seven were launched between 1975 and 1982, before it was replaced by the N-II. Six of the seven launches were successful, however on the fifth flight, there was recontact between the satellite and the third stage, which caused the satellite to fail.
The Institute for Unmanned Space Experiment Free Flyer (USEF) (財団法人無人宇宙実験システム研究開発機構) was a Japanese space agency, which was founded by the Ministry of International Trade and Industry in 1986. Unlike NASDA, ISAS, and NAL, it was not included in the JAXA organization, which was founded in 2003. The chairperson is Ichiro Taniguchi.

HTV-1, also known as the HTV Demonstration Flight or HTV Technical Demonstration Vehicle, was the first Japanese Space Agency (JAXA) H-II Transfer Vehicle, launched in September 2009 to resupply the International Space Station and support the JAXA Kibō module or Japanese Experiment Module (JEM). It was an uncrewed cargo spacecraft carrying a mixture of pressurised and unpressurised cargo to the International Space Station. After a 52-day successful mission, HTV departed the ISS on 31 October 2009 after being released by the station's robotic arm. The spacecraft re-entered in the atmosphere of Earth on 1 November 2009 and disintegrated on re-entry as planned.

The Japanese space program originated in the mid-1950s as a research group led by Hideo Itokawa at the University of Tokyo. The size of the rockets produced gradually increased from under 30 cm (12 in) at the start of the project, to over 15 m (49 ft) by the mid-1960s. The aim of the original research project was to launch a man-made satellite.

Docking and berthing of spacecraft is the joining of two space vehicles. This connection can be temporary, or partially permanent such as for space station modules.
Space Infrastructure Servicing (SIS) is a spacecraft concept being developed by Canadian aerospace firm MDA to operate as a small-scale in-space refueling depot for communication satellites in geosynchronous orbit.
Magnetic Bearing Flywheel Experimental System (MABES), also known as Jindai (じんだい) is a National Space Development Agency of Japan(NASDA) satellite mission. It conducted experiments on the levitation of the magnetic bearing flywheel in a zero-G environment, and tested the function of the launch lock mechanism.
SPADEX or Space Docking Experiment is a twin spacecraft mission being developed by Indian Space Research Organisation to mature technologies related to orbital rendezvous, docking, formation flying and remote robotic arm operations, with scope of applications in human spaceflight, in-space satellite servicing and other proximity operations.
