Related Research Articles

A lander is a spacecraft that descends towards, then comes to rest on the surface of an astronomical body other than Earth. In contrast to an impact probe, which makes a hard landing that damages or destroys the probe upon reaching the surface, a lander makes a soft landing after which the probe remains functional.

A Mars rover is a remote-controlled motor vehicle designed to travel on the surface of Mars. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control. They serve a different purpose than orbital spacecraft like Mars Reconnaissance Orbiter. A more recent development is the Mars helicopter.
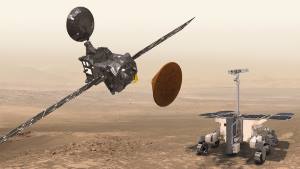
ExoMars is an astrobiology programme of the European Space Agency (ESA) and the Russian space agency (Roscosmos).

The Mars Telecommunications Orbiter (MTO) was a cancelled Mars mission that was originally intended to launch in 2009 and would have established an Interplanetary Internet between Earth and Mars. The spacecraft would have arrived in a high orbit above Mars in 2010 and relayed data packets to Earth from a variety of Mars landers, rovers and orbiters for as long as ten years, at an extremely high data rate. Such a dedicated communications satellite was thought to be necessary due to the vast quantity of scientific information to be sent to Earth by landers such as the Mars Science Laboratory.

The Astrobiology Field Laboratory (AFL) was a proposed NASA rover that would have conducted a search for life on Mars. This proposed mission, which was not funded, would have landed a rover on Mars in 2016 and explore a site for habitat. Examples of such sites are an active or extinct hydrothermal deposit, a dry lake or a specific polar site.

SELENE-2, or the Selenological and Engineering Explorer 2, is a cancelled Japanese robotic mission to the Moon that would have included an orbiter, a lander and a rover. It was intended as a successor to the 2007 SELENE (Kaguya) lunar orbiter.

Mars MetNet is a planned atmospheric science mission to Mars, initiated by the Finnish Meteorological Institute (FMI) and under development by Finland, Russia and Spain. By September 2013, two flight-capable entry, descent and landing systems (EDLS) have been manufactured and tested. As of 2015 baseline funding exists until 2020. As of 2016, neither the launch vehicle nor precursory launch date have been set.
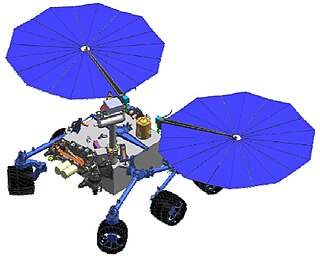
The Mars Astrobiology Explorer-Cacher (MAX-C), also known as Mars 2018 mission, was a NASA concept for a Mars rover mission, proposed to be launched in 2018 together with the European ExoMars rover. The MAX-C rover concept was cancelled in April 2011 due to budget cuts.

A lunar rover or Moon rover is a space exploration vehicle designed to move across the surface of the Moon. The Apollo program's Lunar Roving Vehicle was driven on the Moon by members of three American crews, Apollo 15, 16, and 17. Other rovers have been partially or fully autonomous robots, such as the Soviet Union's Lunokhods, Chinese Yutus, Indian Pragyan, and Japan's LEVs. Five countries have had operating rovers on the Moon: the Soviet Union, the United States, China, India, and Japan.
Mars Exploration Program (MEP) is a long-term effort to explore the planet Mars, funded and led by NASA. Formed in 1993, MEP has made use of orbital spacecraft, landers, and Mars rovers to explore the possibilities of life on Mars, as well as the planet's climate and natural resources. The program is managed by NASA's Science Mission Directorate by Doug McCuistion of the Planetary Science Division. As a result of 40% cuts to NASA's budget for fiscal year 2013, the Mars Program Planning Group (MPPG) was formed to help reformulate the MEP, bringing together leaders of NASA's technology, science, human operations, and science missions.

The SpaceX Red Dragon was a 2011–2017 concept for using an uncrewed modified SpaceX Dragon 2 for low-cost Mars lander missions to be launched using Falcon Heavy rockets.
The (Japanese) Lunar Exploration Program is a program of robotic and human missions to the Moon undertaken by the Japanese Aerospace Exploration Agency (JAXA) and its division, the Institute of Space and Astronautical Science (ISAS). It is also one of the three major enterprises of the JAXA Space Exploration Center (JSPEC). The main goal of the program is "to elucidate the origin and evolution of the Moon and utilize the Moon in the future".
OKEANOS was a proposed mission concept to Trojan asteroids, which share Jupiter's orbit, using a hybrid solar sail for propulsion; the sail was planned to be covered with thin solar panels to power an ion engine. In situ analysis of the collected samples would have been performed by either direct contact or using a lander carrying a high-resolution mass spectrometer. A sample-return to Earth was an option under study.

Tianwen-1 Chinese: 天问一号 is an interplanetary mission by the China National Space Administration (CNSA) which sent a robotic spacecraft to Mars, consisting of 6 spacecraft: an orbiter, two deployable cameras, lander, remote camera, and the Zhurong rover. The spacecraft, with a total mass of nearly five tons, is one of the heaviest probes launched to Mars and carries 14 scientific instruments. It is the first in a series of planned missions undertaken by CNSA as part of its Planetary Exploration of China program.

Smart Lander for Investigating Moon (SLIM) is a lunar lander mission of the Japan Aerospace Exploration Agency (JAXA). The lander's initial launch date in 2021 was postponed until 2023 due to delays in its rideshare, the X-Ray Imaging and Spectroscopy Mission (XRISM). On 6 September 2023 at 23:42 UTC, XRISM launched, and SLIM separated from it later that day.
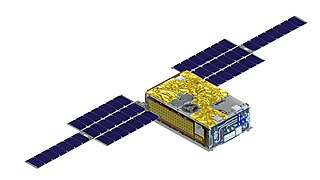
EQUULEUS is a nanosatellite of the 6U CubeSat format that will measure the distribution of plasma that surrounds the Earth (plasmasphere) to help scientists understand the radiation environment in that region. It will also demonstrate low-thrust trajectory control techniques, such as multiple lunar flybys, within the Earth-Moon region using water steam as propellant. The spacecraft was designed and developed jointly by the Japan Aerospace Exploration Agency (JAXA) and the University of Tokyo.

Martian Moons eXploration (MMX) is a robotic space probe set for launch in 2026 to bring back the first samples from Mars' largest moon Phobos. Developed by the Japan Aerospace Exploration Agency (JAXA) and announced on 9 June 2015, MMX will land and collect samples from Phobos once or twice, along with conducting Deimos flyby observations and monitoring Mars's climate.
The Lunar Polar Exploration Mission (LUPEX) is a planned joint lunar mission by the Indian Space Research Organisation (ISRO) and Japan Aerospace Exploration Agency (JAXA). The mission would send an uncrewed lunar lander and rover to explore the south pole region of the Moon no earlier than 2026. It is envisaged to explore the permanently shadowed regions on the Moon. JAXA is likely to provide the H3 launch vehicle and the rover, while ISRO would be providing the lander.
HERACLES is a planned robotic transport system to and from the Moon by Europe (ESA), Japan (JAXA) and Canada (CSA) that will feature a lander called the European Large Logistic Lander, a Lunar Ascent Element, and a rover. The lander can be configured for different operations such as up to 1.5 tons of cargo delivery, sample-returns, or prospecting resources found on the Moon.
The NASA-ESA Mars Sample Return is a proposed Flagship-class Mars sample return (MSR) mission to collect Martian rock and soil samples in 43 small, cylindrical, pencil-sized, titanium tubes and return them to Earth around 2033.
References
- 1 2 3 4 5 6 7 8 9 10 Miyamoto, Hirdy (ed.). Current plan of the MELOS, a proposed Japanese Mars mission (PDF). MEPAG meeting 2015.
- 1 2 Satoh, Takehiko (February 2012), "MELOS: Japan's Mars Exploration Plan ~ Updates on MELOS" (PDF), MEPAG 2012, Washington D.C.: Japan Aerospace Exploration Agency (JAXA), archived from the original (PDF) on 2013-02-19, retrieved 2012-10-18
- ↑ Sasaki, Sho (March 2009), "Japan's Mars Exploration Plan: MELOS", The 2009 MEPAG Meeting (PDF), archived from the original (PDF) on 2013-02-20, retrieved 2012-10-17
- ↑ MELOS: Japan's Mars Exploration Plan for 2020s. MEPAG in Lisbon, Portugal (16–17 June 2011)
- ↑ Hatakenaka, Ryuta; Fujita, Kazuhisa; Nonomura, Taku; Takai, Takai (12 July 2015). Preliminary Thermal Design of the Japanese Mars Rover (PDF). 45th International Conference on Environmental Systems.
- ↑ FUJITA, Koji; NAGAI, Hiroki; OYAMA, Akira (2016). "A Parametric Study of Mars Airplane Concept for Science Mission on Mars". Trans. JSASS Aerospace Tech. Japan. 14 (ists30): Pk_83–Pk_88. Bibcode:2016JSAST..14.Pk83F. doi: 10.2322/tastj.14.Pk_83 .
| Active |
|    | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Past |
| ||||||||||
| |||||||||||
| Future |
| ||||||||||
| |||||||||||
| Exploration |
| ||||||||||
Missions are ordered by launch date. Sign † indicates failure en route or before intended mission data returned. | |||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||
| |||||||||||||||||||||