
The Lunar Roving Vehicle (LRV) is a battery-powered four-wheeled rover used on the Moon in the last three missions of the American Apollo program during 1971 and 1972. It is popularly called the Moon buggy, a play on the term "dune buggy".

An aerobot is an aerial robot, usually used in the context of an unmanned space probe or unmanned aerial vehicle.

LOK Luna 17 was an uncrewed space mission of the Luna program, also called Lunik 17. It deployed the first robotic rover onto the surface of the Moon.

NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.

The Nomad rover is an uncrewed vehicle designed as a test for such a vehicle to ride on other planets.

Spirit, also known as MER-A or MER-2, is a Mars robotic rover, active from 2004 to 2010. Spirit was operational on Mars for 2208 sols or 3.3 Martian years. It was one of two rovers of NASA's Mars Exploration Rover Mission managed by the Jet Propulsion Laboratory (JPL). Spirit landed successfully within the impact crater Gusev on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity (MER-B), which landed on the other side of the planet. Its name was chosen through a NASA-sponsored student essay competition. The rover got stuck in a "sand trap" in late 2009 at an angle that hampered recharging of its batteries; its last communication with Earth was on March 22, 2010.

A cryobot or Philberth-probe is a robot that can penetrate water ice. A cryobot uses heat to melt the ice, and gravity to sink downward.

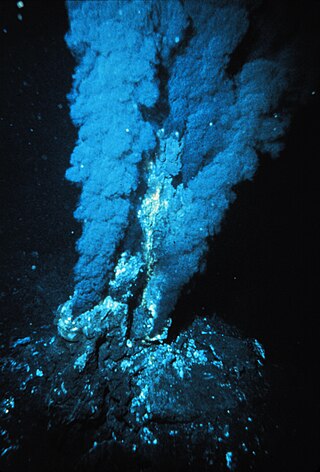
The Deep Phreatic Thermal Explorer (DEPTHX) is an autonomous underwater vehicle designed and built by Stone Aerospace, an aerospace engineering firm based in Austin, Texas. It was designed to autonomously explore and map underwater sinkholes in northern Mexico, as well as collect water and wall core samples. This could be achieved via an autonomous form of navigation known as A-Navigation. The DEPTHX vehicle was the first of three vehicles to be built by Stone Aerospace which were funded by NASA with the goal of developing technology that can explore the oceans of Jupiter's moon Europa to look for extraterrestrial life.

ATHLETE is a six-legged robotic lunar rover under development by the Jet Propulsion Laboratory (JPL). ATHLETE is a testbed for systems, and is designed for use on the Moon.
ENDURANCE is an autonomous underwater vehicle designed to map in three dimensions the geochemistry and biology of underwater terrains in Antarctica. The vehicle was built and designed by Stone Aerospace, and is the second incarnation of the DEPTHX vehicle, which was significantly reconfigured for the challenges particular to the Antarctic environment.
Astrobiology Science and Technology for Exploring Planets (ASTEP) was a program established by NASA to sponsor research projects that advance the technology and techniques used in planetary exploration. The objective was to enable the study of astrobiology and to aid the planning of extraterrestrial exploration missions while prioritizing science, technology, and field campaigns.

A lunar rover or Moon rover is a space exploration vehicle designed to move across the surface of the Moon. The Apollo program's Lunar Roving Vehicle was driven on the Moon by members of three American crews, Apollo 15, 16, and 17. Other rovers have been partially or fully autonomous robots, such as the Soviet Union's Lunokhods, Chinese Yutus, and the Indian Pragyan. Four countries have had operating rovers on the Moon: the Soviet Union, the United States, China and India.
Stone Aerospace is an aerospace engineering firm founded by engineer and explorer Bill Stone, located in Del Valle, a suburb of Austin, Texas.

IceMole is an autonomous ice research probe, incorporating a new type of ice-melting tip for the exploration of polar regions, glaciers, ice sheets, and extraterrestrial regions, developed by a team from the FH Aachen, a Fachhochschule in Aachen, Germany. The advantage over previous probes is that the IceMole can change its direction and can be recovered after being used. A driving ice screw allows the probe to drill through soil layers and other contaminations in the ice.
The SOLO-TREC is a profiling float that uses a novel thermal recharging engine powered by the natural temperature differences found at different ocean depths to cycle up and down in the ocean. The research and prototype were developed by researchers at the Jet Propulsion Laboratory in Pasadena, CA, and the Scripps Institution of Oceanography in San Diego, CA. The project name stands for "Sounding Oceanographic Lagrangrian Observer Thermal RECharging" vehicle.
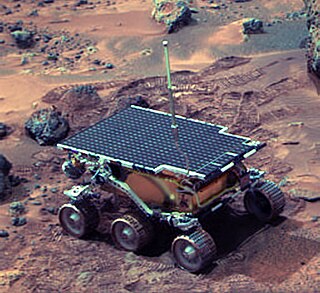
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.
The future of space exploration involves both telescopic exploration and the physical exploration of space by robotic spacecraft and human spaceflight.

SPINDLE is a 2-stage autonomous vehicle system consisting of a robotic ice-penetrating carrier vehicle (cryobot) and an autonomous submersible HAUV . The cryobot is designed to descend through an ice body into a sub-surface ocean and deploy the HAUV submersible to conduct long range reconnaissance, life search, and sample collection. The HAUV submersible will return to, and auto-dock with, the cryobot at the conclusion of the mission for subsequent data uplink and sample return to the surface.
The World Is Not Enough (WINE) is a US project developing a refuelable steam engine system for spacecraft propulsion. WINE developed a method of extracting volatiles from ice, ice-rich regolith, and hydrated soils and uses it as steam propulsion which allows the spacecraft to refuel multiple times and have an extraordinary long service lifetime. This would allow a single spacecraft to visit multiple asteroids, comets or several landing locations at an icy world such as the Moon, Mars, Pluto, Enceladus, Ganymede, Europa, etc.
