
Algebraic geometry is a branch of mathematics which uses abstract algebraic techniques, mainly from commutative algebra, to solve geometrical problems. Classically, it studies zeros of multivariate polynomials; the modern approach generalizes this in a few different aspects.
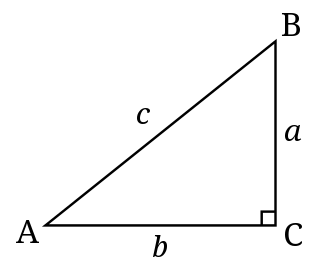
In mathematics, analytic geometry, also known as coordinate geometry or Cartesian geometry, is the study of geometry using a coordinate system. This contrasts with synthetic geometry.
In mathematics, a Diophantine equation is an equation, typically a polynomial equation in two or more unknowns with integer coefficients, for which only integer solutions are of interest. A linear Diophantine equation equates to a constant the sum of two or more monomials, each of degree one. An exponential Diophantine equation is one in which unknowns can appear in exponents.
In mathematics, an equation is a mathematical formula that expresses the equality of two expressions, by connecting them with the equals sign =. The word equation and its cognates in other languages may have subtly different meanings; for example, in French an équation is defined as containing one or more variables, while in English, any well-formed formula consisting of two expressions related with an equals sign is an equation.

Linear algebra is the branch of mathematics concerning linear equations such as:

In mathematics, a system of linear equations is a collection of two or more linear equations involving the same variables. For example,
In mathematics, a linear differential equation is a differential equation that is defined by a linear polynomial in the unknown function and its derivatives, that is an equation of the form where a0(x), ..., an(x) and b(x) are arbitrary differentiable functions that do not need to be linear, and y′, ..., y(n) are the successive derivatives of an unknown function y of the variable x.
In mathematics, a stiff equation is a differential equation for which certain numerical methods for solving the equation are numerically unstable, unless the step size is taken to be extremely small. It has proven difficult to formulate a precise definition of stiffness, but the main idea is that the equation includes some terms that can lead to rapid variation in the solution.
In linear algebra, an eigenvector or characteristic vector is a vector that has its direction unchanged by a given linear transformation. More precisely, an eigenvector, , of a linear transformation, , is scaled by a constant factor, , when the linear transformation is applied to it: . The corresponding eigenvalue, characteristic value, or characteristic root is the multiplying factor .
In mathematics, complex dimension usually refers to the dimension of a complex manifold or a complex algebraic variety. These are spaces in which the local neighborhoods of points are modeled on a Cartesian product of the form for some , and the complex dimension is the exponent in this product. Because can in turn be modeled by , a space with complex dimension will have real dimension. That is, a smooth manifold of complex dimension has real dimension ; and a complex algebraic variety of complex dimension , away from any singular point, will also be a smooth manifold of real dimension .
Numerical continuation is a method of computing approximate solutions of a system of parameterized nonlinear equations,
In mathematics, a system of equations is considered overdetermined if there are more equations than unknowns. An overdetermined system is almost always inconsistent when constructed with random coefficients. However, an overdetermined system will have solutions in some cases, for example if some equation occurs several times in the system, or if some equations are linear combinations of the others.
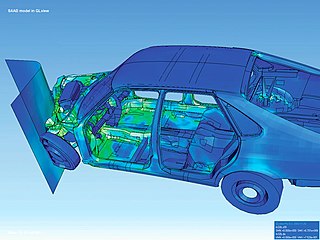
Finite element method (FEM) is a popular method for numerically solving differential equations arising in engineering and mathematical modeling. Typical problem areas of interest include the traditional fields of structural analysis, heat transfer, fluid flow, mass transport, and electromagnetic potential. Computers are usually used to perform the calculations required. With high-speed supercomputers, better solutions can be achieved and are often required to solve the largest and most complex problems.
In mathematics, the multiplicity of a member of a multiset is the number of times it appears in the multiset. For example, the number of times a given polynomial has a root at a given point is the multiplicity of that root.
A system of polynomial equations is a set of simultaneous equations f1 = 0, ..., fh = 0 where the fi are polynomials in several variables, say x1, ..., xn, over some field k.
In computer algebra, a triangular decomposition of a polynomial system S is a set of simpler polynomial systems S1, ..., Se such that a point is a solution of S if and only if it is a solution of one of the systems S1, ..., Se.

In mathematics, an ordinary differential equation (ODE) is a differential equation (DE) dependent on only a single independent variable. As with other DE, its unknown(s) consists of one function(s) and involves the derivatives of those functions. The term "ordinary" is used in contrast with partial differential equations (PDEs) which may be with respect to more than one independent variable, and, less commonly, in contrast with stochastic differential equations (SDEs) where the progression is random.
Andrew John Sommese is an American mathematician, specializing in algebraic geometry.
Numerical certification is the process of verifying the correctness of a candidate solution to a system of equations. In (numerical) computational mathematics, such as numerical algebraic geometry, candidate solutions are computed algorithmically, but there is the possibility that errors have corrupted the candidates. For instance, in addition to the inexactness of input data and candidate solutions, numerical errors or errors in the discretization of the problem may result in corrupted candidate solutions. The goal of numerical certification is to provide a certificate which proves which of these candidates are, indeed, approximate solutions.
Nonlinear algebra is the nonlinear analogue to linear algebra, generalizing notions of spaces and transformations coming from the linear setting. Algebraic geometry is one of the main areas of mathematical research supporting nonlinear algebra, while major components coming from computational mathematics support the development of the area into maturity.
















