
2001 Mars Odyssey is a robotic spacecraft orbiting the planet Mars. The project was developed by NASA, and contracted out to Lockheed Martin, with an expected cost for the entire mission of US$297 million. Its mission is to use spectrometers and a thermal imager to detect evidence of past or present water and ice, as well as study the planet's geology and radiation environment. The data Odyssey obtains is intended to help answer the question of whether life once existed on Mars and create a risk-assessment of the radiation that future astronauts on Mars might experience. It also acts as a relay for communications between the Curiosity rover, and previously the Mars Exploration Rovers and Phoenix lander, to Earth. The mission was named as a tribute to Arthur C. Clarke, evoking the name of his and Stanley Kubrick's 1968 film 2001: A Space Odyssey.

Mars Pathfinder is an American robotic spacecraft that landed a base station with a roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight, 10.6 kg (23 lb) wheeled robotic Mars rover named Sojourner, the first rover to operate outside the Earth–Moon system.

NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.

A Mars rover is a remote-controlled motor vehicle designed to travel on the surface of Mars. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control. They serve a different purpose than orbital spacecraft like Mars Reconnaissance Orbiter. A more recent development is the Mars helicopter.
The planet Mars has been explored remotely by spacecraft. Probes sent from Earth, beginning in the late 20th century, have yielded a large increase in knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars has experienced a high failure rate, especially the early attempts. Roughly sixty percent of all spacecraft destined for Mars failed before completing their missions, with some failing before their observations could even begin. Some missions have been met with unexpected success, such as the twin Mars Exploration Rovers, Spirit and Opportunity, which operated for years beyond their specification.

Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.
Maestro (software) was a free program released by NASA to allow users to view photos and daily progress of the Spirit and Opportunity rovers. It served as an activity planner for Mars that utilized a combination of 2D and 3D visuals to track the movement and missions of the Spirit and Opportunity rovers in 2004.

The rocker-bogie system is the suspension arrangement developed in 1988 for use in NASA's Mars rover Sojourner, and which has since become NASA's favored design for rovers. It has been used in the 2003 Mars Exploration Rover mission robots Spirit and Opportunity, on the 2012 Mars Science Laboratory (MSL) mission's rover Curiosity, the Mars 2020 rover Perseverance and ISRO's Chandrayaan-3 rover Pragyan in 2023.
The embedded computer systems onboard Mars rovers are designed to withstand high radiation levels and large temperature changes in space. For this reason their computational resources are limited compared to systems commonly used on Earth.

The multi-mission radioisotope thermoelectric generator (MMRTG) is a type of radioisotope thermoelectric generator (RTG) developed for NASA space missions such as the Mars Science Laboratory (MSL), under the jurisdiction of the United States Department of Energy's Office of Space and Defense Power Systems within the Office of Nuclear Energy. The MMRTG was developed by an industry team of Aerojet Rocketdyne and Teledyne Energy Systems.
Curiosity is a car-sized Mars rover exploring Gale crater and Mount Sharp on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.
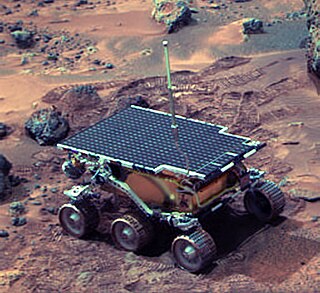
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.

Each Pancam is one of two electronic stereo cameras on Mars Exploration Rovers Spirit and Opportunity. It has a filter wheel assembly that enables it to view different wavelengths of light and the pair of Pancams are mounted beside two NavCams on the MER camera bar assembly.
Mars 2020 is a NASA mission that includes the rover Perseverance, the now-retired small robotic helicopter Ingenuity, and associated delivery systems, as part of the Mars Exploration Program. Mars 2020 was launched on an Atlas V rocket at 11:50:01 UTC on July 30, 2020, and landed in the Martian crater Jezero on February 18, 2021, with confirmation received at 20:55 UTC. On March 5, 2021, NASA named the landing site Octavia E. Butler Landing. As of 16 July 2024, Perseverance has been on Mars for 1210 sols. Ingenuity operated on Mars for 1042 sols before sustaining serious damage to its rotor blades, possibly all four, causing NASA to retire the craft on January 25, 2024.

Navcam, short for navigational camera, is a type of camera found on certain robotic rovers or spacecraft used for navigation without interfering with scientific instruments. Navcams typically take wide angle photographs that are used to plan the next moves of the vehicle or object tracking.

Tianwen-1 Chinese: 天问一号 is an interplanetary mission by the China National Space Administration (CNSA) which sent a robotic spacecraft to Mars, consisting of 6 spacecraft: an orbiter, two deployable cameras, lander, remote camera, and the Zhurong rover. The spacecraft, with a total mass of nearly five tons, is one of the heaviest probes launched to Mars and carries 14 scientific instruments. It is the first in a series of planned missions undertaken by CNSA as part of its Planetary Exploration of China program.

Sarah Milkovich is lead of Science Operations for the Mars 2020 rover at Jet Propulsion Laboratory. She was investigation scientist for the HiRISE camera on the Mars Reconnaissance Orbiter.
The Cachecam, a photographic camera, is mounted inside the rover underbelly, at the top of the sample cache of NASA's Mars 2020 rover mission to Mars.

Perseverance, nicknamed Percy, is a car-sized Mars rover designed to explore the Jezero crater on Mars as part of NASA's Mars 2020 mission. It was manufactured by the Jet Propulsion Laboratory and launched on July 30, 2020, at 11:50 UTC. Confirmation that the rover successfully landed on Mars was received on February 18, 2021, at 20:55 UTC. As of 14 July 2024, Perseverance has been active on Mars for 1209 sols since its landing. Following the rover's arrival, NASA named the landing site Octavia E. Butler Landing.
The Mars 2020 mission, consisting of the rover Perseverance and helicopter Ingenuity, was launched on July 30, 2020, and landed in Jezero crater on Mars on February 18, 2021. As of July 7, 2024, Perseverance has been on the planet for 1202 sols. Ingenuity operated for 1042 sols until its rotor blades, possibly all four, were damaged during the landing of flight 72 on January 18, 2024, causing NASA to retire the craft.




