This article has multiple issues. Please help improve it or discuss these issues on the talk page . (Learn how and when to remove these messages)
|
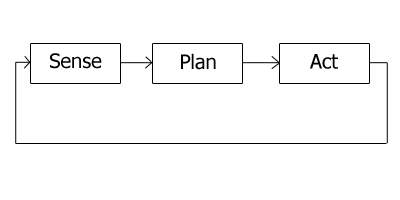
In robotics, a robotic paradigm is a mental model of how a robot operates. A robotic paradigm can be described by the relationship between the three basic elements of robotics: Sensing, Planning, and Acting. It can also be described by how sensory data is processed and distributed through the system, and where decisions are made.