
A medical robot is a robot used in the medical sciences. They include surgical robots. These are in most telemanipulators, which use the surgeon's activators on one side to control the "effector" on the other side. [1] [2] [3]
A medical robot is a robot used in the medical sciences. They include surgical robots. These are in most telemanipulators, which use the surgeon's activators on one side to control the "effector" on the other side. [1] [2] [3]

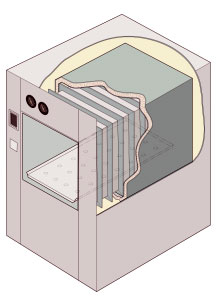
An autoclave is a machine used to carry out industrial and scientific processes requiring elevated temperature and pressure in relation to ambient pressure and/or temperature. Autoclaves are used before surgical procedures to perform sterilization and in the chemical industry to cure coatings and vulcanize rubber and for hydrothermal synthesis. Industrial autoclaves are used in industrial applications, especially in the manufacturing of composites.

Telerobotics is the area of robotics concerned with the control of semi-autonomous robots from a distance, chiefly using television, wireless networks or tethered connections. It is a combination of two major subfields, which are teleoperation and telepresence.

Health informatics is the field of science and engineering that aims at developing methods and technologies for the acquisition, processing, and study of patient data, which can come from different sources and modalities, such as electronic health records, diagnostic test results, medical scans. The health domain provides an extremely wide variety of problems that can be tackled using computational techniques.
Remote surgery is the ability for a doctor to perform surgery on a patient even though they are not physically in the same location. It is a form of telepresence. A robot surgical system generally consists of one or more arms, a master controller (console), and a sensory system giving feedback to the user. Remote surgery combines elements of robotics, telecommunications such as high-speed data connections and elements of management information systems. While the field of robotic surgery is fairly well established, most of these robots are controlled by surgeons at the location of the surgery. Remote surgery is remote work for surgeons, where the physical distance between the surgeon and the patient is less relevant. It promises to allow the expertise of specialized surgeons to be available to patients worldwide, without the need for patients to travel beyond their local hospital.

Telehealth is the distribution of health-related services and information via electronic information and telecommunication technologies. It allows long-distance patient and clinician contact, care, advice, reminders, education, intervention, monitoring, and remote admissions. Telemedicine is sometimes used as a synonym, or is used in a more limited sense to describe remote clinical services, such as diagnosis and monitoring. When rural settings, lack of transport, a lack of mobility, conditions due to outbreaks, epidemics or pandemics, decreased funding, or a lack of staff restrict access to care, telehealth may bridge the gap as well as provide distance-learning; meetings, supervision, and presentations between practitioners; online information and health data management and healthcare system integration. Telehealth could include two clinicians discussing a case over video conference; a robotic surgery occurring through remote access; physical therapy done via digital monitoring instruments, live feed and application combinations; tests being forwarded between facilities for interpretation by a higher specialist; home monitoring through continuous sending of patient health data; client to practitioner online conference; or even videophone interpretation during a consult.
Emergency is a humanitarian NGO that provides free medical treatment to the victims of war, poverty, and landmines. It was founded in 1994. Gino Strada, one of the organization's co-founders, served as EMERGENCY's Executive Director. It operates on the premise that access to high-quality healthcare is a fundamental human right.

Robot-assisted surgery or robotic surgery are any types of surgical procedures that are performed using robotic systems. Robotically assisted surgery was developed to try to overcome the limitations of pre-existing minimally-invasive surgical procedures and to enhance the capabilities of surgeons performing open surgery.
Health technology is defined by the World Health Organization as the "application of organized knowledge and skills in the form of devices, medicines, vaccines, procedures, and systems developed to solve a health problem and improve quality of lives". This includes pharmaceuticals, devices, procedures, and organizational systems used in the healthcare industry, as well as computer-supported information systems. In the United States, these technologies involve standardized physical objects, as well as traditional and designed social means and methods to treat or care for patients.

A mobile robot is an automatic machine that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.
A virtual fixture is an overlay of augmented sensory information upon a user's perception of a real environment in order to improve human performance in both direct and remotely manipulated tasks. Developed in the early 1990s by Louis Rosenberg at the U.S. Air Force Research Laboratory (AFRL), Virtual Fixtures was a pioneering platform in virtual reality and augmented reality technologies.
Computer-assisted surgery (CAS) represents a surgical concept and set of methods, that use computer technology for surgical planning, and for guiding or performing surgical interventions. CAS is also known as computer-aided surgery, computer-assisted intervention, image-guided surgery, digital surgery and surgical navigation, but these are terms that are more or less synonymous with CAS. CAS has been a leading factor in the development of robotic surgery.
An MRI robot is a medical robot capable of operating within a magnetic resonance imaging (MRI) scanner for the purpose of performing or assisting in image-guided interventions (IGI).
Pharmacy automation involves the mechanical processes of handling and distributing medications. Any pharmacy task may be involved, including counting small objects ; measuring and mixing powders and liquids for compounding; tracking and updating customer information in databases ; and inventory management. This article focuses on the changes that have taken place in the local, or community pharmacy since the 1960s.
Rehabilitation robotics is a field of research dedicated to understanding and augmenting rehabilitation through the application of robotic devices. Rehabilitation robotics includes development of robotic devices tailored for assisting different sensorimotor functions(e.g. arm, hand, leg, ankle), development of different schemes of assisting therapeutic training, and assessment of sensorimotor performance of patient; here, robots are used mainly as therapy aids instead of assistive devices. Rehabilitation using robotics is generally well tolerated by patients, and has been found to be an effective adjunct to therapy in individuals with motor impairments, especially due to stroke.
MiroSurge is a presently prototypic robotic system designed mainly for research in minimally invasive telesurgery. In the described configuration, the system is designed according to the master slave principle and enables the operator to remotely control minimally invasive surgical instruments including force/torque feedback. The scenario is developed at the Institute of Robotics and Mechatronics within the German Aerospace Center (DLR).
Masakatsu G. Fujie is a Japanese scientist who has played a major role in cutting-edge research in biomedical engineering. He has been responsible for many advances in the field of robotics.
HOSPI is a hospital delivery robot manufactured by Panasonic. HOSPI service robots were originally developed to be used in healthcare amid Japan's rapidly aging society. It features autonomous navigation capabilities, which allows it navigate using onboard sensors instead of obtrusive rail systems or delineated routes.
The AdventHealth Nicholson Center is a medical research and training center with locations in Celebration and Orlando, Florida. Founded in 2001, it operates within the AdventHealth network and trains physicians on foundational surgical techniques, including robotic surgery and laparoscopic surgery, using tools like robotic simulators, wet and dry labs. Using emerging robotic, laparoscopic and orthopedic surgical techniques, the Nicholson Center is researching to develop modified ways to operate.

Gregory D. Hager is the Mandell Bellmore Professor of Computer Science and founding director of the Johns Hopkins Malone Center for Engineering in Healthcare at Johns Hopkins University.
Autonomous pharmacy is an approach to medication management that seeks to create a more automated and data-driven process for medication inventory and dispensing. The main concept behind autonomous pharmacy is to use technology in place of manual medication processes in order to help healthcare providers reduce medication errors, decrease costs and save staff time. Autonomous pharmacy may use a combination of hardware, software and technology-enabled services to allow pharmacists to more effectively manage medication dispersal.
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Navigation and mapping | ||
| Research | ||
| Companies | ||
| Related | ||