Automatic train operation (ATO) is a method of operating trainsautomatically where the driver is not required or is required for supervision at most.[1] Alternatively, ATO can be defined as a subsystem within the automatic train control, which performs any or all of functions like programmed stopping, speed adjusting, door operation, and similar otherwise assigned to the train operator.[2]
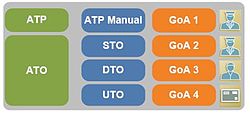
The degree of automation is indicated by the Grade of Automation (GoA), up to GoA4 in which the train is automatically controlled without any staff on board.[3] On most systems for lower grades of automation up to GoA2, there is a driver present to mitigate risks associated with failures or emergencies. Driverless automation is primarily used on automated guideway transit systems where it is easier to ensure the safety due to isolated tracks. Fully automated trains for mainline railways are an area of research.[4] The first driverless experiments in the history of train automation date back to 1920s.[5]
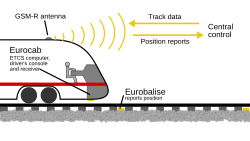
A train driver controls starting and stopping, operation of doors and handling of emergencies or sudden diversions. Overseen signals due to human errors are safeguarded by train protection systems like ETCS L1.[11]
1
GoA2
Semi-automatic (STO)
Starting and stopping are automated using advanced train protection systems like ETCS L2 or 3,[11][12] but a driver operates the doors, drives the train if needed and handles emergencies. Many ATO systems are GoA2. In this system, trains run automatically from station to station but a driver is in the cab, with responsibility for door closing, obstacle detection on the track in front of the train and handling of emergency situations. As in a GoA3 system, the GoA2 train cannot operate safely without the staff member on board. Examples include the London Underground's Victoria line and New York City Subway's 7 route.
2
GoA3
Driverless (DTO)
Starting and stopping are automated, but a train attendant operates the doors and drives the train in case of emergencies. In this system, trains run automatically from station to station but a staff member is always in the train, with responsibility for handling of emergency situations. In a GoA3 system, the train cannot operate safely without the staff member on board. Examples include the Docklands Light Railway.
3 and 4
GoA4
Unattended (UTO) or Manless (MTO)
Starting, stopping and operation of doors are all fully automated without any on-train staff. It is recommended that stations have platform screen doors installed. In this system, trains are capable of operating automatically at all times, including door closing, obstacle detection and emergency situations. On-board staff may be provided for other purposes, e.g. customer service, but are not required for safe operation. Controls are often provided to drive the train manually in the event of a computer failure. CBTC is considered a basic enabler technology for GoA4.[11] Examples include the Delhi Metro, Bangalore Metro, Vancouver Skytrain,Singapore MRT and the Thessaloniki Metro.
Additional types
Grade of automation
Description and examples
GoA1+
In addition to GoA1, there is connected on-board train energy optimisation (C-DAS) over ETCS.[13]
GoA2+
In case of Amsterdam Metro, a GoA2 is able to reverse in GoA4 at the final stations.[14] This is indicated by '+'. GoA2+ is also present on Bucharest Metro line M5, which uses the same URBALIS 400 CBTC as Amsterdam.
In Japan, this is a form of "driverless operation with an attendant" where the attendant sits in the cab and is responsible for detecting obstacles and making emergency stops in addition to other duties of a GoA3 attendant.[16]Kyushu Railway Company started one of the first revenue demonstration runs of GoA2.5-ready system on the Kashii Line (between Saitozaki and Kashii Stations) on December 24, 2020 while still posting drivers on the train[17] and has since started regular revenue operation without drivers on the entire Kashii Line and beyond.[18]
GoA3+
An umbrella term for GoA3 and GoA4 meaning replacement of human train driver.[19] The terms GoA3/4, GoA3,4 and autonomous trains are used synonymously.[20][16]
Many modern systems are linked with automatic train protection (ATP) and, in many cases, automatic train control (ATC) where normal signaling operations such as route setting and train regulation are carried out by the system. The ATC and ATP systems will work together to maintain a train within a defined tolerance of its timetable. The combined system will marginally adjust operating parameters such as the ratio of power to coasting when moving and station dwell time in order to adhere to a defined timetable.[citation needed]
Whereas ATP is the safety system that ensures a safe spacing between trains and provides sufficient warning as to when to stop. ATO is the "non-safety" part of train operation related to station stops and starts, and indicates the stopping position for the train once the ATP has confirmed that the line is clear.[citation needed]
The train approaches the station under clear signals, so it can do a normal run-in. When it reaches the first beacon – originally a looped cable, now usually a fixed transponder – a station brake command is received by the train. The on-board computer calculates the braking curve to enable it to stop at the correct point, and as the train runs in towards the platform, the curve is updated a number of times (which varies from system to system) to ensure accuracy.[21]
When the train has stopped, it verifies that its brakes are applied and checks that it has stopped within the door-enabling loops. These loops verify the position of the train relative to the platform and which side the doors should open. Once all this is complete, the ATO will open the doors. After a set time, predetermined or varied by the control centre as required, the ATO will close the doors and automatically restart the train if the door closed proving circuit is complete. Some systems have platformscreen doors as well. ATO will also provide a signal for these to open once it has completed the on-board checking procedure. Although described here as an ATO function, door enabling at stations is often incorporated as part of the ATP equipment because it is regarded as a "vital" system and requires the same safety validation processes as ATP.[21]
Once door operation is completed, ATO will accelerate the train to its cruising speed, allow it to coast to the next station brake command beacon and then brake into the next station, assuming no intervention by the ATP system.[21]
While ATO has been proven to drastically reduce the chance of human errors in railway operation, there have been a few notable accidents involving ATO systems:
Year
Territory
Incident
1993
Japan
On 5 October 1993, an automated Nankō Port Town Line train overran the line's southern terminus at Suminoekōen Station and collided with a buffer stop, injuring 217 people. The cause was believed to have been a malfunction in some of the relays in the line's ATO equipment that transmits the brake command signal, causing the brakes to not operate.[24] Operations resumed on 19 November 1993 after redundancy equipment was installed and tested on the line.[25]
2011
China
On 27 September 2011 at 14:51 hours local time (06:51 hours UTC), two trains on Shanghai Metro Line 10 collided between Yuyuan Garden station and Laoximen station, injuring 284–300 people. Initial investigations found that train operators violated regulations while operating the trains manually after a loss of power on the line caused its ATO and signalling systems to fail. No deaths were reported.[26]
2015
Mexico
On 4 May 2015, at around 18:00 hours local time (00:00 hours UTC)[27] during heavy rain with hail,[28] two trains crashed at Oceanía station on Mexico City Metro Line 5 while both were heading toward Politécnico station.[29] The first train, No.4, was parked at the end of Oceanía station's platform after the driver reported that a plywood board was obstructing the tracks.[30] The second train, No.5, left Terminal Aérea station with the analogue PA-135 ATO system turned on despite the driver being asked to turn it off and to operate the train manually,[31] as the protocol requests it when it rains because trains have to drive with reduced speed.[32] Train No.5 crashed into Train No. 4 at 31.8km/h (19.8mph)[31] – double the average on arrival at the platforms[30] – and left twelve people injured.[33]
2017
Singapore
Joo Koon rail accident – on 15 November 2017 at about 08:30 hours local time (00:30 hours UTC), one SMRTEast-West LineC151A train rear-ended another C151A train at Joo Koon MRT station in Singapore, causing 38 injuries. At that time, the East-West Line was in the process of having its previous Westinghouse ATC fixed block signalling and associated ATO system replaced with the ThalesSelTrac CBTC moving block signalling system. One of the trains involved had a safety protection feature removed when it went over a faulty signalling circuit as a fix for a known software bug, hence "bursting" the signalling bubble and leading to the collision.[34]
2017
India
Before the prime minister was supposed to ride the train, a few days before the opening, a Delhi Metro train was undergoing ATO trials at the Kalindi Kunj Depot. As the train approached the buffer, it hit the buffers and derailed, hitting the front wall. The wall was eventually patched with bricks. However, it was eventually realized that the brakes were not applied by the train by default under the operation.[35] This led to the trains being controlled by drivers until 2024, delaying the full UTO operations by seven years.
2019
Hong Kong
A similar incident as the above occurred on the MTR Tsuen Wan Line in Hong Kong on 18 March 2019, when two MTR M-Train EMUs crashed in the crossover track section between Admiralty and Central while MTR was testing a new version of the SelTractrain control system intended to replace the line's existing SACEM signalling system. There were no passengers aboard either train, although the operators of both trains were injured.[36] Before the crash site had been cleaned up, all Tsuen Wan line trains terminated at Admiralty instead of Central. The same vendor also provided a similar signalling system in Singapore, which resulted in the Joo Koon rail accident in 2017.[37] In July 2019, the Electrical and Mechanical Services Department (EMSD) published an investigation report into the incident and concluded that a programming error in the SelTrac signalling system led the ATP system to malfunction, resulting in the collision.[38]
2021
Malaysia
2021 Kelana Jaya LRT collision in Kuala Lumpur, in which 213 people were injured due to human error. The controller and backup controller computer have failed, a train driver was called in to drive the train to the depot. The train driver drives in the opposite direction of the track, leading to a collision with a train. ATP was not triggered due to the train's disappearance from the system as a result of both computers failing.[39]
2022
China
On 22 January 2022, an elder passenger was caught between the traindoor and screendoor in Qi'an Road station of Line 15 (Shanghai Metro). On seeing the situation, the staff misoperated the traindoor controlling system, allowing the screen door to isolate without detecting, causing the train run a short while and fatally injuring the trapped passenger.[40]
2023
Taiwan
On 10 May 2023, a construction crane fell onto the tracks of Taichung MRT Green line south of Feng-le Park metro station. The driverless train was stationary when the crane fell onto the tracks and the train proceeded to drive and collide into the obstacle. Train attendants contacted the control center about the fallen crane obstructing the track. However, it would require 20 seconds to activate the emergency brakes remotely, which was insufficient to prevent the collision.
2025
Quebec
On the early morning of November 22, 2025, a group of three people attempted to cross a highway and the tracks of the Réseau express métropolitain (REM) in Montreal, and were struck by a train near Du Quartier station. One person was killed immediately, and another died later in the hospital.[41][42]
ATO pilot project at Kouvola - Kotka - Hamina ETCS test track[64][65]
Finland
Future
In October 2021, the pilot project of the "world's first automated, driverless train" on regular tracks shared with other rail traffic was launched in Hamburg, Germany. The conventional, standard-track, non-metro train technology could, according to reports, theoretically be implemented for rail transport worldwide and is also substantially more energy efficient.[66][67]
In April 2022, JR West announced that they would test ATO on a 12-car W7 series Shinkansen train used on the Hokuriku Shinkansen at the Hakusan General Rolling Stock Yard during 2022.[69]
All lines built for the new Sydney Metro feature driverless operation without any staff in attendance.
From 2012, the Toronto subway underwent signal upgrades in order to use ATO and ATC over the next decade.[70] Work has been completed on sections Yonge–University line.[71] The underground portion of Line 5 Eglinton was equipped with ATC and ATO in 2022. The underground portion will use a GoA2 system while the Eglinton Maintenance and Storage Facility will use a GoA4 system and travel driverless around the yard.[72] The Ontario Line is proposed have a GoA4 driverless system and will open in 2030.[73]
The Vienna U-Bahn is scheduled to be equipped with driverless ATO in 2026 on the new U5 line.
In a pilot project of Digirail two Stadler FLIRT trainsets (Sm5) will be equipped with ATO (and ETCS) for testing purposes by Siemens Mobility.[64][65]
Train automatic stopping controller – An automatic braking system used on some Japanese railway lines, can also be combined with ATO as its auto-braking function
↑Elisabeth Fischer (23 August 2011). "Justifying automation". Railway-Technology.com. Archived from the original on 12 November 2020. Retrieved 3 January 2013.
↑Korf, Wim; Grinwis, Piet; Podt, Theo (2010). "Anticiperen op waardevol vervoer"(PDF) (in Dutch). Rapportage audit Noord/Zuidlijn. Archived from the original(PDF) on 2022-07-18. Retrieved 2022-05-02.
↑"2024 年3月 16 日より2つの「自動運転」を開始します!"(PDF) (Press release) (in Japanese). Kyushu Railway Company. 2024-02-22. Archived(PDF) from the original on 2025-03-19. Retrieved 2026-01-19.
↑Lagay, Rémy; Adell, Gemma Morral (October 2018). "The Autonomous Train: A game changer for the railways industry". 2018 16th International Conference on Intelligent Transportation Systems Telecommunications (ITST). pp.1–5. doi:10.1109/ITST.2018.8566728. ISBN978-1-5386-5544-3. S2CID54463761.
123"ATO". Railway Technical Web Page. Archived from the original on 12 April 2012.
↑Robles, Johana; Ruiz, Fanny (5 May 2015). "Chocan trenes en Línea 5 del Metro"[Trains crash ate Metro Line 5]. El Universal (in Spanish). Archived from the original on 30 May 2021. Retrieved 30 May 2021.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.