
Assistive technology (AT) is a term for assistive, adaptive, and rehabilitative devices for people with disabilities and the elderly. Disabled people often have difficulty performing activities of daily living (ADLs) independently, or even with assistance. ADLs are self-care activities that include toileting, mobility (ambulation), eating, bathing, dressing, grooming, and personal device care. Assistive technology can ameliorate the effects of disabilities that limit the ability to perform ADLs. Assistive technology promotes greater independence by enabling people to perform tasks they were formerly unable to accomplish, or had great difficulty accomplishing, by providing enhancements to, or changing methods of interacting with, the technology needed to accomplish such tasks. For example, wheelchairs provide independent mobility for those who cannot walk, while assistive eating devices can enable people who cannot feed themselves to do so. Due to assistive technology, disabled people have an opportunity of a more positive and easygoing lifestyle, with an increase in "social participation," "security and control," and a greater chance to "reduce institutional costs without significantly increasing household expenses." In schools, assistive technology can be critical in allowing students with disabilities access the general education curriculum. Students who experience challenges writing or keyboarding, for example, can use voice recognition software instead.
Paraplegia, or paraparesis, is an impairment in motor or sensory function of the lower extremities. The word comes from Ionic Greek (παραπληγίη) "half-stricken". It is usually caused by spinal cord injury or a congenital condition that affects the neural (brain) elements of the spinal canal. The area of the spinal canal that is affected in paraplegia is either the thoracic, lumbar, or sacral regions. If four limbs are affected by paralysis, tetraplegia or quadriplegia is the correct term. If only one limb is affected, the correct term is monoplegia. Spastic paraplegia is a form of paraplegia defined by spasticity of the affected muscles, rather than flaccid paralysis.

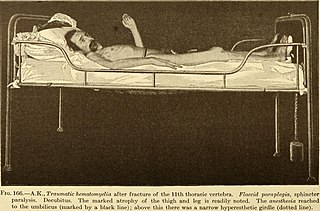
A spinal cord injury (SCI) is damage to the spinal cord that causes temporary or permanent changes in its function. Symptoms may include loss of muscle function, sensation, or autonomic function in the parts of the body served by the spinal cord below the level of the injury. Injury can occur at any level of the spinal cord and can be complete, with a total loss of sensation and muscle function at lower sacral segments, or incomplete, meaning some nervous signals are able to travel past the injured area of the cord up to the Sacral S4-5 spinal cord segments. Depending on the location and severity of damage, the symptoms vary, from numbness to paralysis, including bowel or bladder incontinence. Long term outcomes also range widely, from full recovery to permanent tetraplegia or paraplegia. Complications can include muscle atrophy, loss of voluntary motor control, spasticity, pressure sores, infections, and breathing problems.

A standing frame is assistive technology that can be used by a person who relies on a wheelchair for mobility. A standing frame provides alternative positioning to sitting in a wheelchair by supporting the person in the standing position.

A mobility assistance dog or mobility service dog is a dog trained to assist a physically disabled person who has mobility issues, such as poor balance or being a non-ambulatory wheelchair user. Roles include "providing balance and stability" picking up and carrying objects, pulling wheelchairs, opening and closing doors, and operating light switches. Mobility assistance dogs can have significant positive impacts on the lives of their handlers.
Rehabilitation engineering is the systematic application of engineering sciences to design, develop, adapt, test, evaluate, apply, and distribute technological solutions to problems confronted by individuals with disabilities. These individuals may have experienced a spinal cord injury, brain trauma, or any other debilitating injury or disease. Functional areas addressed through rehabilitation engineering may include mobility, communications, hearing, vision, and cognition, and activities associated with employment, independent living, education, and integration into the community.
Gait training or gait rehabilitation is the act of learning how to walk, either as a child, or, more frequently, after sustaining an injury or disability. Normal human gait is a complex process, which happens due to co-ordinated movements of the whole of the body, requiring the whole of Central Nervous System - the brain and spinal cord, to function properly. Any disease process affecting the brain, spinal cord, peripheral nerves emerging from them supplying the muscles, or the muscles itself can cause deviations of gait. The process of relearning how to walk is generally facilitated by Physiatrists or Rehabilitation medicine (PM&R) consultants, physical therapists or physiotherapists, along with occupational therapists and other allied specialists. The most common cause for gait impairment is due to an injury of one or both legs. Gait training is not simply re-educating a patient on how to walk, but also includes an initial assessment of their gait cycle - Gait analysis, creation of a plan to address the problem, as well as teaching the patient on how to walk on different surfaces. Assistive devices and splints (orthosis) are often used in gait training, especially with those who have had surgery or an injury on their legs, but also with those who have balance or strength impairments as well.

Wheelchair racing is the racing of wheelchairs in track and road races. Wheelchair racing is open to athletes with any qualifying type of disability, amputees, spinal cord injuries, cerebral palsy and partially sighted. Athletes are classified in accordance with the nature and severity of their disability or combinations of disabilities. Like running, it can take place on a track or as a road race. The main competitions take place at the Summer Paralympics which wheelchair racing and athletics has been a part of since 1960. Competitors compete in specialized wheelchairs which allow the athletes to reach speeds of 30 km/h (18.6 mph) or more. It is one of the most prominent forms of Paralympic athletics.
Neurorehabilitation is a complex medical process which aims to aid recovery from a nervous system injury, and to minimize and/or compensate for any functional alterations resulting from it.
Shepherd Center is a private, not-for profit hospital in Atlanta, Georgia. Founded in 1975, the 152-bed hospital focuses on the medical treatment, research and rehabilitation for people with spinal cord injury and disease, acquired brain injury, multiple sclerosis, chronic pain and other neuromuscular problems.
MedStar National Rehabilitation Network is located in Washington, D.C., and specializes in treating persons with physical disabilities, including spinal cord injury, brain injury, stroke, arthritis, amputation, multiple sclerosis, post-polio syndrome, orthopedic, and other neurological conditions. National Rehabilitation Hospital was founded in 1986 by Edward A. Eckenhoff, and is a member of the MedStar Health system, the Washington, D.C.-Baltimore region's largest non-profit healthcare organization.

Spinal locomotion results from intricate dynamic interactions between a central program in lower thoracolumbar spine and proprioceptive feedback from body in the absence of central control by brain as in complete spinal cord injury (SCI). Following SCI, the spinal circuitry below the lesion site does not become silent rather it continues to maintain active and functional neuronal properties although in a modified manner.
A wheelchair trainer or wheelchair treadmill is an apparatus that allows a manual wheelchair user to simulate linear (translational) travel while remaining stationary in a manner similar to an ambulatory person walking or running on a treadmill or a cyclist pedaling a bicycle on a bicycle trainer. The rear wheelchair wheels are placed in contact with vertical or horizontal rollers which may also be attached to flywheels, mechanical resistance or braking mechanisms, motors and various speed and force sensors. Flywheels may be sized to provide a user of a certain mass with a rotational inertia equivalent to their translational (linear) inertia in order to more realistically approximate actual wheelchair propulsion.
Rehabilitation robotics is a field of research dedicated to understanding and augmenting rehabilitation through the application of robotic devices. Rehabilitation robotics includes development of robotic devices tailored for assisting different sensorimotor functions(e.g. arm, hand, leg, ankle), development of different schemes of assisting therapeutic training, and assessment of sensorimotor performance of patient; here, robots are used mainly as therapy aids instead of assistive devices. Rehabilitation using robotics is generally well tolerated by patients, and has been found to be an effective adjunct to therapy in individuals with motor impairments, especially due to stroke.
A gait trainer is a wheeled device that assists a person who is unable to walk independently to learn or relearn to walk safely and efficiently as part of gait training. Gait trainers are intended for children or adults with physical disabilities, to provide the opportunity to improve walking ability. A gait trainer offers both unweighting support and postural alignment to enable gait practice. It functions as a support walker and provides more assistance for balance and weight-bearing, than does a traditional rollator walker, or a walker with platform attachments. It also provides opportunities to stand and to bear weight in a safe, supported position.
When treating a person with a spinal cord injury, repairing the damage created by injury is the ultimate goal. By using a variety of treatments, greater improvements are achieved, and, therefore, treatment should not be limited to one method. Furthermore, increasing activity will increase his/her chances of recovery.
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
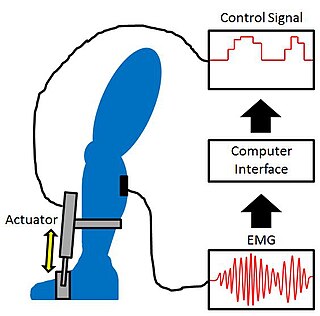
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.

Although spinal cord injury (SCI) often causes sexual dysfunction, many people with SCI are able to have satisfying sex lives. Physical limitations acquired from SCI affect sexual function and sexuality in broader areas, which in turn has important effects on quality of life. Damage to the spinal cord impairs its ability to transmit messages between the brain and parts of the body below the level of the lesion. This results in lost or reduced sensation and muscle motion, and affects orgasm, erection, ejaculation, and vaginal lubrication. More indirect causes of sexual dysfunction include pain, weakness, and side effects of medications. Psycho-social causes include depression and altered self-image. Many people with SCI have satisfying sex lives, and many experience sexual arousal and orgasm. People with SCI employ a variety of adaptations to help carry on their sex lives healthily, by focusing on different areas of the body and types of sexual acts. Neural plasticity may account for increases in sensitivity in parts of the body that have not lost sensation, so people often find newly sensitive erotic areas of the skin in erogenous zones or near borders between areas of preserved and lost sensation.
Janice Jennifer Eng is a professor in the University of British Columbia's Department of Physical Therapy and Canada Research Chair in Neurological Rehabilitation.
