A real-time operating system (RTOS) is an operating system (OS) for real-time computing applications that processes data and events that have critically defined time constraints. An RTOS is distinct from a time-sharing operating system, such as Unix, which manages the sharing of system resources with a scheduler, data buffers, or fixed task prioritization in a multitasking or multiprogramming environment. Processing time requirements need to be fully understood and bound rather than just kept as a minimum. All processing must occur within the defined constraints. Real-time operating systems are event-driven and preemptive, meaning the OS can monitor the relevant priority of competing tasks, and make changes to the task priority. Event-driven systems switch between tasks based on their priorities, while time-sharing systems switch the task based on clock interrupts.

An embedded system is a computer system—a combination of a computer processor, computer memory, and input/output peripheral devices—that has a dedicated function within a larger mechanical or electronic system. It is embedded as part of a complete device often including electrical or electronic hardware and mechanical parts. Because an embedded system typically controls physical operations of the machine that it is embedded within, it often has real-time computing constraints. Embedded systems control many devices in common use. In 2009, it was estimated that ninety-eight percent of all microprocessors manufactured were used in embedded systems.
In computing, scheduling is the action of assigning resources to perform tasks. The resources may be processors, network links or expansion cards. The tasks may be threads, processes or data flows.
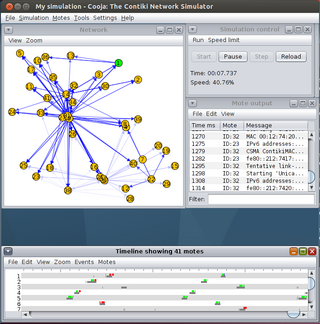
Contiki is an operating system for networked, memory-constrained systems with a focus on low-power wireless Internet of Things (IoT) devices. Contiki is used for systems for street lighting, sound monitoring for smart cities, radiation monitoring and alarms. It is open-source software released under the BSD-3-Clause license.
Micro-Controller Operating Systems is a real-time operating system (RTOS) designed by Jean J. Labrosse in 1991. It is a priority-based preemptive real-time kernel for microprocessors, written mostly in the programming language C. It is intended for use in embedded systems.

FreeRTOS is a real-time operating system kernel for embedded devices that has been ported to 35 microcontroller platforms. It is distributed under the MIT License.
Eclipse ThreadX is a highly deterministic, embedded real-time operating system (RTOS) programmed mostly in the language C.
EKA2 is the second-generation Symbian platform real-time operating system kernel, which originated in the earlier operating system EPOC.
Fixed-priority preemptive scheduling is a scheduling system commonly used in real-time systems. With fixed priority preemptive scheduling, the scheduler ensures that at any given time, the processor executes the highest priority task of all those tasks that are currently ready to execute.

The Completely Fair Scheduler (CFS) is a process scheduler that was merged into the 2.6.23 release of the Linux kernel and is the default scheduler of the tasks of the SCHED_NORMAL class. It handles CPU resource allocation for executing processes, and aims to maximize overall CPU utilization while also maximizing interactive performance.
TI-RTOS is an embedded tools ecosystem created and offered by Texas Instruments (TI) for use across a range of their embedded system processors. It includes a real-time operating system (RTOS) component named TI-RTOS Kernel, networking connectivity stacks, power management, file systems, instrumentation, and inter-processor communications like DSP/BIOS Link. It is free and open-source software, released under a BSD license.

ChibiOS/RT is a compact and fast real-time operating system supporting multiple architectures and released under a mix of the GNU General Public License version 3 (GPL3) and the Apache License 2.0. It is developed by Giovanni Di Sirio.

XtratuM is a bare-metal hypervisor specially designed for embedded real-time systems available for the instruction sets LEON2/3/4, ARM v7 and V8 processors and RISC-V processor.
The Brain Fuck Scheduler (BFS) is a process scheduler designed for the Linux kernel in August 2009 based on earliest eligible virtual deadline first scheduling (EEVDF), as an alternative to the Completely Fair Scheduler (CFS) and the O(1) scheduler. BFS was created by Con Kolivas.
The Slurm Workload Manager, formerly known as Simple Linux Utility for Resource Management (SLURM), or simply Slurm, is a free and open-source job scheduler for Linux and Unix-like kernels, used by many of the world's supercomputers and computer clusters.
Earliest deadline first (EDF) or least time to go is a dynamic priority scheduling algorithm used in real-time operating systems to place processes in a priority queue. Whenever a scheduling event occurs the queue will be searched for the process closest to its deadline. This process is the next to be scheduled for execution.
OpenTag is a DASH7 protocol stack and minimal Real-Time Operating System (RTOS), written in the C programming language. It is designed to run on microcontrollers or radio Systems on a Chip (SoC). OpenTag was engineered to be a very compact software package. However, with proper configuration, it can also run in any POSIX environment. OpenTag can also provide all functionality required for any type of DASH7 Mode 2 device, rather than just the eponymous “tag”-type endpoint device.

Rodos is a real-time operating system for embedded systems and was designed for application domains demanding high dependability.
Time-Sensitive Networking (TSN) is a set of standards under development by the Time-Sensitive Networking task group of the IEEE 802.1 working group. The TSN task group was formed in November 2012 by renaming the existing Audio Video Bridging Task Group and continuing its work. The name changed as a result of the extension of the working area of the standardization group. The standards define mechanisms for the time-sensitive transmission of data over deterministic Ethernet networks.

Apache Mynewt is a modular real-time operating system for connected Internet of things (IoT) devices that must operate for long times under power, memory, and storage constraints. It is free and open-source software incubating under the Apache Software Foundation, with source code distributed under the Apache License 2.0, a permissive license that is conducive to commercial adoption of open-source software.