A device driver is software that operates or controls a particular type of device that is attached to a computer.[1] A driver provides a software interface to hardware devices, enabling other software to access hardware functions without needing to know precise details about the hardware.
A driver communicates with the device through the computer bus or communications subsystem to which the hardware connects. When a calling program invokes a routine in the driver, the driver issues commands to the device (drives it). Once the device sends data back to the driver, the driver may invoke routines in the original calling program.
Drivers are hardware-dependent and operating-system-specific. They usually provide the interrupt handling required for any necessary asynchronous time-dependent hardware interface.[2]
Purpose
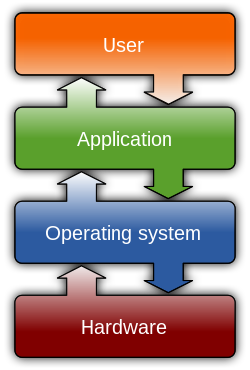
The main purpose of device drivers is to provide hardware abstraction by acting as a translator between a hardware device and the applications or operating systems that use it.[1] Programmers can write higher-level application code independently of whatever specific hardware the end-user is using.
For example, a high-level application for interacting with a serial port may simply have two functions for send data and receive data. At a lower level, a device driver implementing these functions would communicate with the particular serial port controller installed on a user's computer. The commands needed to control a 16550 UART are much different from the commands needed to control a USB-to-serial adapter, but each hardware-specific device driver abstracts these details into the same (or similar) software interface.
Development
Writing a device driver requires an in-depth understanding of how the hardware and the software work for a given platform function. Because drivers require low-level access to hardware functions in order to operate, drivers typically operate in a highly privileged environment and can cause system operational issues if something goes wrong. In contrast, misbehavior in most user-level software on modern operating systems can be stopped without greatly affecting the rest of the system. Even drivers executing in user mode can crash a system if the device is erroneously programmed. These factors make it more difficult and dangerous to diagnose problems.[3]
The task of writing drivers thus usually falls to software or computer engineers who work for hardware-development companies. This is because, as employees, they have better information than most outsiders about the design of the hardware. Moreover, it was traditionally considered in the hardware manufacturer's interest to guarantee that their clients can use their hardware in an optimal way. Typically, the hardware abstraction portion of the driver is written by the operating system vendor, while the lower-level physical device access portion is implemented by the device vendor. However, in recent years, non-vendors have written numerous device drivers for proprietary devices, mainly for use with free and open source operating systems. In such cases, it is important that the hardware manufacturer provide information on how the device communicates. Although this information can instead be learned by reverse engineering, this is much more difficult with hardware than it is with software.
Windows uses a combination of driver and minidriver, where the full class/port driver is provided with the operating system, and miniclass/miniport drivers are developed by vendors and implement hardware- or function-specific subset of the full driver stack.[4] Miniport model is used by NDIS, WDM, WDDM, WaveRT, StorPort, WIA, and HID drivers; each of them uses device-specific APIs and still requires the developer to handle tedious device management tasks.
Microsoft has attempted to reduce system instability due to poorly written device drivers by creating a new framework for driver development, called Windows Driver Frameworks (WDF). This includes User-Mode Driver Framework (UMDF) that encourages development of certain types of drivers—primarily those that implement a message-based protocol for communicating with their devices—as user-mode drivers. If such drivers malfunction, they do not cause system instability. The Kernel-Mode Driver Framework (KMDF) model continues to allow development of kernel-mode device drivers but attempts to provide standard implementations of functions that are known to cause problems, including cancellation of I/O operations, power management, and plug-and-play device support.
Apple has an open-source framework for developing drivers on macOS, called I/O Kit.
In Linux environments, programmers can build device drivers as parts of the kernel, separately as loadable modules, or as user-mode drivers (for certain types of devices where kernel interfaces exist, such as for USB devices). Makedev includes a list of the devices in Linux, including ttyS (terminal), lp (parallel port), hd (disk), loop, and sound (these include mixer, sequencer, dsp, and audio).[5]
Microsoft Windows.sys files and Linux .ko files can contain loadable device drivers. The advantage of loadable device drivers is that they can be loaded only when necessary and then unloaded, thus saving kernel memory.
Privilege levels
Depending on the operating system, device drivers may be permitted to run at various different privilege levels. The choice of which level of privilege the drivers are in is largely decided by the type of kernel an operating system uses. An operating system that uses a monolithic kernel, such as the Linux kernel, will typically run device drivers with the same privilege as all other kernel objects. By contrast, a system designed around microkernel, such as Minix, will place drivers as processes independent from the kernel but that use it for essential input-output functionalities and to pass messages between user programs and each other.[6] On Windows NT, a system with a hybrid kernel, it is common for device drivers to run in either kernel-mode or user-mode.[7]
The most common mechanism for segregating memory into various privilege levels is via protection rings. On many systems, such as those with x86 and ARM processors, switching between rings imposes a performance penalty, a factor that operating system developers and embedded software engineers consider when creating drivers for devices which are preferred to be run with low latency, such as network interface cards. The primary benefit of running a driver in user mode is improved stability since a poorly written user-mode device driver cannot crash the system by overwriting kernel memory.[8]
Applications
Because of the diversity of modern[update] hardware and operating systems, drivers operate in many different environments.[9] Drivers may interface with:
Virtual device drivers represent a particular variant of device drivers. They are used to emulate a hardware device, particularly in virtualization environments, for example when a guest operating system is run on a Xen host. Instead of enabling the guest operating system to dialog with hardware, virtual device drivers take the opposite role and emulates a piece of hardware, so that the guest operating system and its drivers running inside a virtual machine can have the illusion of accessing real hardware. Attempts by the guest operating system to access the hardware are routed to the virtual device driver in the host operating system as e.g.,function calls. The virtual device driver can also send simulated processor-level events like interrupts into the virtual machine.
Virtual devices may also operate in a non-virtualized environment. For example, a virtual network adapter is used with a virtual private network, while a virtual disk device is used with iSCSI. A good example for virtual device drivers can be Daemon Tools.
There are several variants of virtual device drivers, such as VxDs, VLMs, and VDDs.
Dynax Driver Framework (dxd) – C++ open source cross-platform driver framework for KMDF and IOKit[17]
Identifiers
A device on the PCI bus or USB is identified by two IDs which consist of two bytes each. The vendor ID identifies the vendor of the device. The device ID identifies a specific device from that manufacturer/vendor.
A PCI device has often an ID pair for the main chip of the device, and also a subsystem ID pair that identifies the vendor, which may be different from the chip manufacturer.
Security
Computers often have many diverse and customized device drivers running in their operating system kernel which often contain various bugs and vulnerabilities, making them a target for exploits.[18] A Bring Your Own Vulnerable Driver (BYOVD) attacker installs any signed, old third-party driver with known vulnerabilities that allow malicious code to be inserted into the kernel.[19] Drivers that may be vulnerable include those for WiFi and Bluetooth,[20][21] gaming/graphics drivers,[22] and drivers for printers.[23]
There is a lack of effective kernel vulnerability detection tools, especially for closed-source operating systems such as Microsoft Windows[24] where the source code of the device drivers is mostly proprietary and not available to examine,[25] and drivers often have many privileges.[26][27][28][29]
An important consideration in the design of a kernel is the support it provides for protection from faults (fault tolerance) and from malicious behaviours (security). These two aspects are usually not clearly distinguished, and the adoption of this distinction in the kernel design leads to the rejection of a hierarchical structure for protection.[33]
The mechanisms or policies provided by the kernel can be classified according to several criteria, including:
whether they are static (enforced at compile time) or dynamic (enforced at run time);
whether they are pre-emptive or post-detection;
whether they are hardware-supported or language-based;
whether they are more an open mechanism, or a binding policy;
according to the protection principles they satisfy (e.g., Denning[34][35]);
↑Tanenbaum, Andrew; Woodhull, Albert (2006). Operating Systems, Design and Implementation (3rd.ed.). Upper Saddle River, NJ: Pearson Pretence Hall. p.256. ISBN0-13-142938-8.
↑Yosifovich, Pavel; Ionescu, Alex; Russinovich, Mark; Solomon, David (2017). Windows Internals, Part 1 (Seventhed.). Redmond, Washington: Microsoft Press. ISBN978-0-7356-8418-8.
↑"CCISS". SourceForge. 2010. Archived from the original on 2010-08-21. Retrieved 2010-08-11. Drivers for the HP (previously Compaq) Smart Array controllers which provide hardware RAID capability.
↑Huang, Yongzhe; Narayanan, Vikram; Detweiler, David; Huang, Kaiming; Tan, Gang; Jaeger, Trent; Burtsev, Anton (2022). "KSplit: Automating Device Driver Isolation"(PDF). Archived(PDF) from the original on 15 September 2022. Retrieved 15 September 2022.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.