Operation
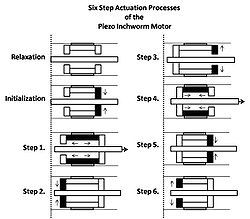
The actuation process of the inchworm motor is a six-step cyclical process after the initial relaxation and initialization phase. Initially, all three piezos are relaxed and unextended. To initialize the inchworm motor the clutching piezo closest to the direction of desired motion (which then becomes the forward clutch piezo) is electrified first then the six-step cycle begins as follows (see Figure 2.):
Step 1. Extension of the lateral piezo.
Step 2. Extension of the aft clutch piezo.
Step 3. Relaxation of the forward clutch piezo.
Step 4. Relaxation of the lateral piezo.
Step 5. Extension of the forward clutch piezo.
Step 6. Relaxation of the aft clutch piezo.
Electrification of the piezo actuators is accomplished by applying a high bias voltage to the actuators in step according to the "Six Step" process described above. To move long distances the sequence of six steps is repeated many times in rapid succession. Once the motor has moved sufficiently close to the desired final position, the motor may be switched to an optional fine positioning mode. In this mode, the clutches receive constant voltage (one high and the other low), and the lateral piezo voltage is then adjusted to an intermediate value, under continuous feedback control, to obtain the desired final position.
The non-powered behaviour of this piezoelectric motor is one of two options: normally locked or normally free. A normally free type allows free movement when unpowered but can still be locked by applying a voltage.
This page is based on this
Wikipedia article Text is available under the
CC BY-SA 4.0 license; additional terms may apply.
Images, videos and audio are available under their respective licenses.